 農業
農業
 トラクター
トラクター
 ジョンディア
ジョンディア
 トラクター作業機
トラクター作業機
 ガイダンス・自動操舵
ガイダンス・自動操舵
 田植機
田植機
 コンバイン・乾燥調製
コンバイン・乾燥調製
 ミニ耕うん機・管理機
ミニ耕うん機・管理機
 乗用管理機
乗用管理機
 ティラー・耕うん機
ティラー・耕うん機
 草刈機
草刈機
 無人ヘリ・ドローン
無人ヘリ・ドローン
 野菜機器
野菜機器
 大豆機器
大豆機器
 畜産・酪農機器
畜産・酪農機器
 運搬車
運搬車
 除雪機
除雪機
 水管理システム
水管理システム
 ミニショベル/油圧ショベル
ミニショベル/油圧ショベル
 ホイルローダー
ホイルローダー
 発電機
発電機
 マリンプレジャー
マリンプレジャー
 プレジャーボート
プレジャーボート
 漁船
漁船
 マリンエンジン
マリンエンジン
 海洋設備
海洋設備
 大形舶用エンジン
大形舶用エンジン
 高速主機関
高速主機関
 中速主機関
中速主機関
 舶用補機
舶用補機 SCRシステム
SCRシステム
 二段過給システム
二段過給システム
 電気推進システム
電気推進システム
 舶用デュアルフューエルエンジン
舶用デュアルフューエルエンジン
 金属ばね防振システム
金属ばね防振システム
 エネルギー
エネルギー
 GHP
GHP
 常用コージェネレーション
常用コージェネレーション
 非常用発電システム
非常用発電システム
 ポンプ駆動システム
ポンプ駆動システム
 カーボンニュートラル
カーボンニュートラル 廃熱ソリューション
廃熱ソリューション
 建設機械
建設機械
 キャリア
キャリア
 汎用関連機器
汎用関連機器
 投光機
投光機
 アタッチメント
アタッチメント
 純正部品
純正部品
 産業エンジン
産業エンジン
 立形水冷ディーゼルエンジン
立形水冷ディーゼルエンジン
 立形水冷ガスエンジン
立形水冷ガスエンジン
 空冷ディーゼルエンジン
空冷ディーゼルエンジン
 横形水冷ディーゼルエンジン
横形水冷ディーゼルエンジン
ヤンマーアグリ株式会社 開発統括部 先行開発部
ヤンマーテクニカルレビュー
普通型コンバインの収穫量センサーの開発
~さらに見える世界への挑戦~
Abstract
Considerable progress is being made across a variety of fields in the development of smart technologies based on ICT and IoT with the goal of realizing “A Sustainable Future”. In the case of agriculture, technology for improving the efficiency of agricultural management through the visualization of yield information has been put to practical use and continues to evolve. Yanmar has developed and commercialized a system for combine harvesters that measures yield in real-time. In order to provide this visualization solution to more people, we have developed a yield sensor (YM-KIT, 1150) for use on such harvesters.
Yanmar intends to continue pursuing this work with the aims of further enhancing yield visualization and helping to develop the food-value-chain.
1.はじめに
持続可能な世界の実現に向けて様々な分野でスマート化をキーワードとしたICT、IoT技術開発が盛んに行われており、農業分野においても農作業や作物の状態を数値化するICT技術の開発・商品化が進んでいる。このような数値化技術の利点は、これまで経験を積み重ねて築いてきた栽培管理をデータに基づいて体系化することで、その精度を向上させることができる点である。これにより収穫量の増大や投入資材の低減といった農業経営の改善が期待できる。また経験をデータという有形な知識にすることで栽培技術の伝承が容易となるため、近年の急激な農業人口の減少によって生じる栽培ノウハウの消失も防止することができる。これはヤンマーが目指すA Sustainable Future 持続可能な農業の実現につながるものと考える。
2.開発のねらい
栽培管理の高精度化にとって重要な数値化対象の一つが収穫量である。圃場毎の収穫量を数値化して「見える化」することができれば、次年度の肥培計画を精度よく行うことができるためである。ヤンマーは、コンバインの収穫作業中に機内を流れる穀粒の量をリアルタイムに計測して収穫量を「見える化」するシステムを開発し、自脱型コンバインに搭載して商品化を行った。今回は、さらに多くの農業生産者に収穫量の「見える化」というソリューションを提供することをねらいとして、普通型コンバインに搭載可能な収穫量センサー(YM-KIT,1150)を開発にした。本稿ではその内容を紹介する。
3.普通型コンバイン収穫量センサーの概要
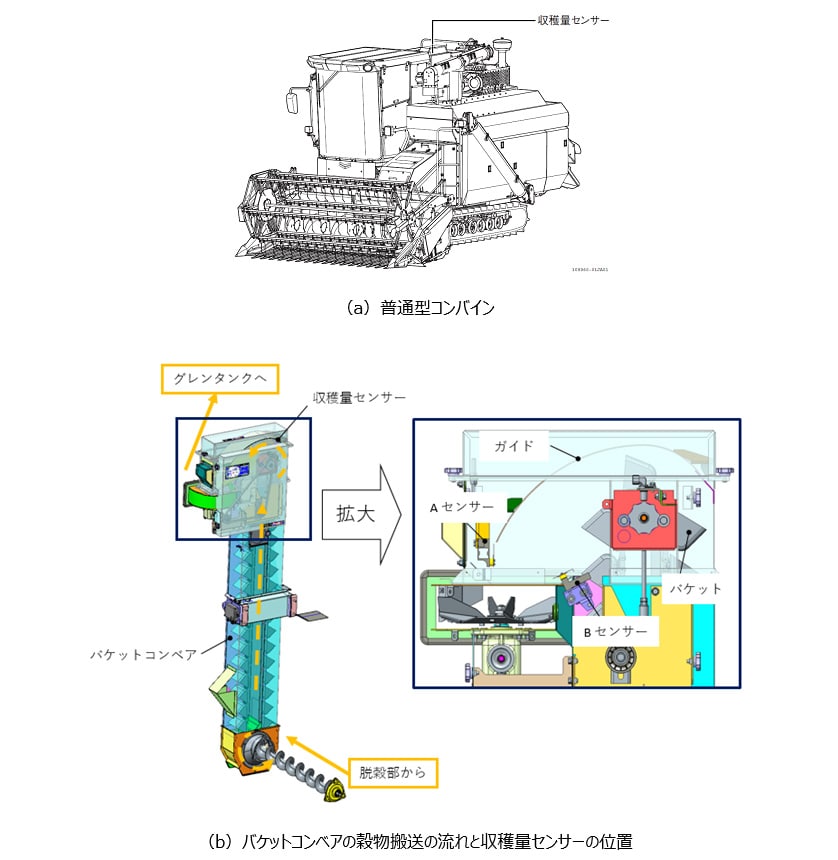
3.1.自脱型コンバインと普通型コンバインの穀粒搬送部の違い
自脱型・普通型コンバインの穀粒搬送部は脱穀部の底部よりグレンタンクの上部へ穀粒を搬送するという機能は同じであるが、穀粒の搬送方式が異なる。
自脱型コンバインはスクリューコンベア方式(図1)を採用しているのに対して普通型コンバインは穀粒をより優しく搬送することができるバケットコンベア方式(図2)を採用している。これは自脱型が稲、麦といった穀粒が小さく比較的外力に対して傷つきにくい作物のみを対象にしているのに対して普通型コンバインは稲、麦に加えて外力に対して傷つきやすい大豆などの大粒径作物も対象としているためである。

右:図2 普通型コンバインのバケットコンベア方式
普通型コンバインの収穫量計測位置は自脱型コンバインと同じく脱穀部からグレンタンクへの穀粒搬送経路間とし、収穫量センサーの設置位置はバケットコンベアの投出し部とした(図3)。しかし上述の搬送方式の違いにより、収穫量を計測するセンサーの詳細な位置や構造、収穫量算出方式は新たな工夫が必要であった。
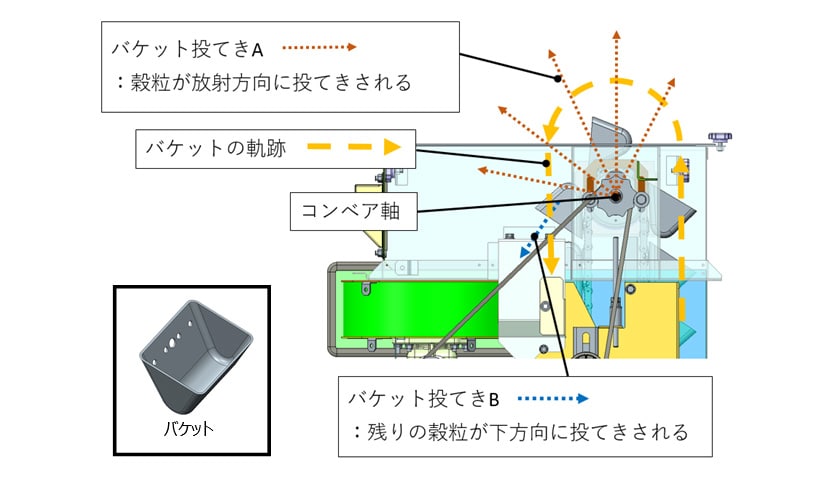
3.2.バケットコンベア方式の特徴
バケットコンベアはバケットと呼ばれる底の深い凹型形状の搬送体で構成されその内部に多くの穀粒が収容されている。そのためバケットが投出しを開始しても、すぐにはすべての穀粒がバケットから放出できず円運動をしながら連続的に放出される。また投出しの様子は大きく2つの投げ方に分けられる。1つは穀粒がコンベア軸を中心に動く遠心力によって放射方向に投出させる部分(バケット投てきA)でもう1つはバケットが円運動から直線運動に変化する時に慣性力によって投出される部分(バケット投てきB)である(図4)。投てきAで放出されなった穀粒が投てきBですべて放出されるがその割合が作物の条件によって変動することがバケットコンベア方式投出しの大きな特徴である。
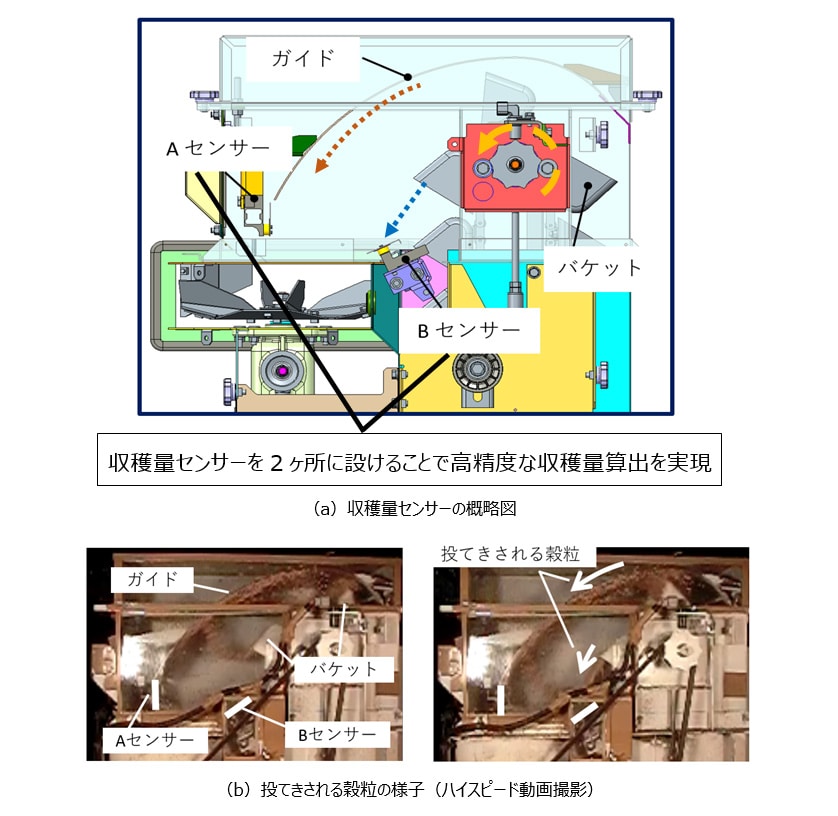
3.3.普通型コンバインの収穫量センサー
普通型コンバインの収穫量センサーは自脱型コンバインに採用している小型ロードセルを用いており、投出された穀粒が収穫量センサーに衝突した時の衝撃値を電気信号に変換することで収穫量を算出する。しかし、普通型コンバインはグレンタンクへの搬送方式が自脱型と異なるため、自脱型の収穫量センサー位置や構造、収穫量算出方式をそのまま移植することは困難であった。特に、作物条件によってバケットの穀粒放出割合に変動が生じる中で、精度よく収穫量を計測することが大きな課題であった。
普通型コンバインの収穫量計測では、この課題を解決するために以下の2つの改善を行っている。1つ目は、バケット上部にガイドを設けたことで、放射状に放出される穀粒を集めてより多くの穀粒を計測に使用することが可能となった。2つ目は、2ヶ所にセンサーを設置したことである。「ガイド」で集められた穀粒を計測する「Aセンサー」と下方に投げ出された穀粒を計測する「Bセンサー」を用いて可能な限り多くの穀粒を計測可能となり、穀粒放出割合に変動が生じる中でも収穫量を高精度で求めることが実現できた(図5)。
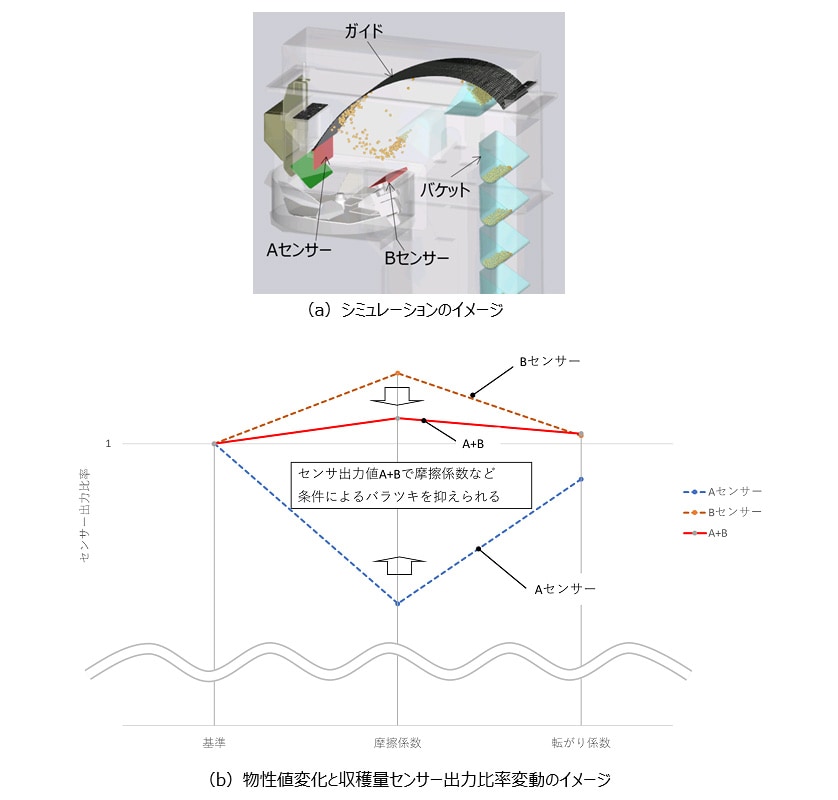
事前検証にはシミュレーションを用いた。穀粒の流れを「見える化」することで解析が容易となり、センサーの位置関係やガイド形状、穀粒の物性がセンサー出力値に影響を与えることが判明できた。
収穫作業では作物の品種や水分といった圃場条件によって摩擦係数と転がり係数など穀粒の物性値が変化する。この物性値変化による収穫量センサー出力値へ影響の検証を一例として紹介する。摩擦係数と転がり係数が変化することでAとBとのセンサー出力値が大きく変動することが確認できた。この結果からAやBセンサーのどちらか1ヶ所のみの計測では穀粒物性変化による収穫推定精度の確保が困難であることが分る。このような穀粒物性変化への対策としてAセンサーとBセンサー2つのセンサーを設置し、その出力値を足し合せることで測定値のばらつき低減が可能であることが確認できた(図6)。
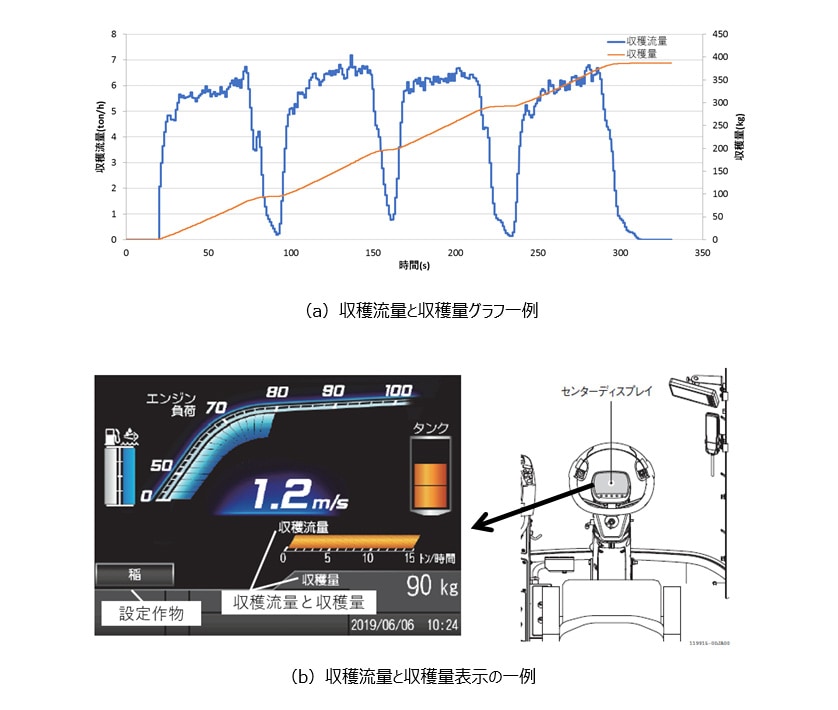
3.4.リアルタイムで計測される収穫流量と収穫量
実際に圃場試験を行い収穫量計測の精度検証を行った。現在は、稲・小麦でリアルタイムに収穫流量と収穫量の計測・「見える化」が可能である(図7)。生産者をトータルでサポートするソリューションであるヤンマーSMART ASSISTと連動してデータを管理・活用することで作業改善や栽培計画の効率化をサポートして行く(図8)。

4.おわりに
コンバインの収穫量センサーによる収穫量の「見える化」は作業分析、計画、管理を容易に実現可能にする世界を広げる小さな一歩である。作業を行いながら取得可能な情報に着目し、システム化することで有効な情報に発展させる可能性を描きながら“わくわく”開発に挑んでいる。これからもさらなる「見える化」に挑戦し食農産業への発展に貢献して行きたい。
著者
