 農業
農業
 トラクター
トラクター
 ジョンディア
ジョンディア
 トラクター作業機
トラクター作業機
 ガイダンス・自動操舵
ガイダンス・自動操舵
 田植機
田植機
 コンバイン・乾燥調製
コンバイン・乾燥調製
 ミニ耕うん機・管理機
ミニ耕うん機・管理機
 乗用管理機
乗用管理機
 ティラー・耕うん機
ティラー・耕うん機
 草刈機
草刈機
 無人ヘリ・ドローン
無人ヘリ・ドローン
 野菜機器
野菜機器
 大豆機器
大豆機器
 畜産・酪農機器
畜産・酪農機器
 運搬車
運搬車
 除雪機
除雪機
 水管理システム
水管理システム
 ミニショベル/油圧ショベル
ミニショベル/油圧ショベル
 ホイルローダー
ホイルローダー
 発電機
発電機
 マリンプレジャー
マリンプレジャー
 プレジャーボート
プレジャーボート
 漁船
漁船
 マリンエンジン
マリンエンジン
 海洋設備
海洋設備
 大形舶用エンジン
大形舶用エンジン
 高速主機関
高速主機関
 中速主機関
中速主機関
 舶用補機
舶用補機 SCRシステム
SCRシステム
 二段過給システム
二段過給システム
 電気推進システム
電気推進システム
 舶用デュアルフューエルエンジン
舶用デュアルフューエルエンジン
 金属ばね防振システム
金属ばね防振システム
 エネルギー
エネルギー
 GHP
GHP
 常用コージェネレーション
常用コージェネレーション
 非常用発電システム
非常用発電システム
 ポンプ駆動システム
ポンプ駆動システム
 カーボンニュートラル
カーボンニュートラル 廃熱ソリューション
廃熱ソリューション
 建設機械
建設機械
 キャリア
キャリア
 汎用関連機器
汎用関連機器
 投光機
投光機
 アタッチメント
アタッチメント
 純正部品
純正部品
 産業エンジン
産業エンジン
 立形水冷ディーゼルエンジン
立形水冷ディーゼルエンジン
 立形水冷ガスエンジン
立形水冷ガスエンジン
 空冷ディーゼルエンジン
空冷ディーゼルエンジン
 横形水冷ディーゼルエンジン
横形水冷ディーゼルエンジン
ヤンマー造船株式会社
商品統括部 商品開発部
ヤンマーテクニカルレビュー
無人航行船技術の紹介
~Robotics Boat(ASV)の開発~
Abstract
The development and utilization of IT has accelerated in recent years, including in the small craft industry where vessels are being equipped with control equipment such as electrical engine control, auto pilots, and dynamic positioning systems. Work in this area by Yanmar includes the development of automatic berthing and unberthing systems and automatic identification technology.
As a part of the Japanese government's Cross-ministerial Strategic Innovation Promotion Program (described below), Yanmar has also participated in the collaborative development of an unmanned vehicle by JAMSTEC. This provided valuable experience and also helped Yanmar improve its own technology. This article describes this work.
1.はじめに
小型船舶における安全航行は大きな課題であり、航行中の事故は全海難事故の内75%を占める。近年、国土交通省、ならびに小型船舶の検査事務、登録測度事務、認証等事務を行う機関である小型船舶検査機構から小型船舶メーカーの航行技術向上により、海難事故低減を強く要望されている。当社では、「有人船の安全航行技術の構築」を実現するために、その方法として「安全航行できる無人船に、人を乗船させることで人の安全を確保する」という考えのもと、無人航行船技術の構築に取り組んでいる。
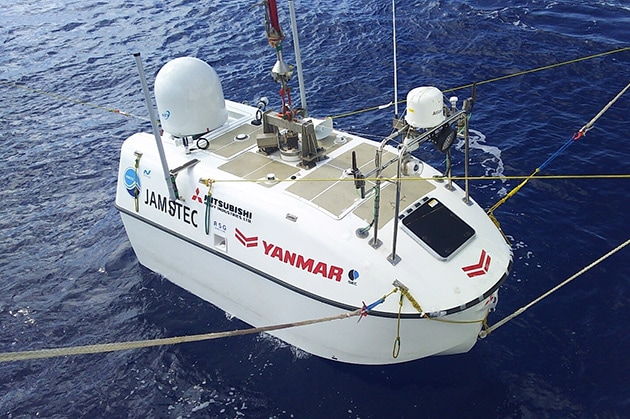
その技術構築の一環として、内閣府が主導する「戦略的イノベーション創造プログラム(SIP)」にヤンマー(株)中央研究所と協働で参画し、2016年度に国立研究開発法人海洋研究開発機構(JAMSTEC)様へ洋上中継器の実証機「Robotics boat(ASV)(*1)」を納入したので、その概要を紹介する。
(*1)ASV :Autonomous Surface Vehicle
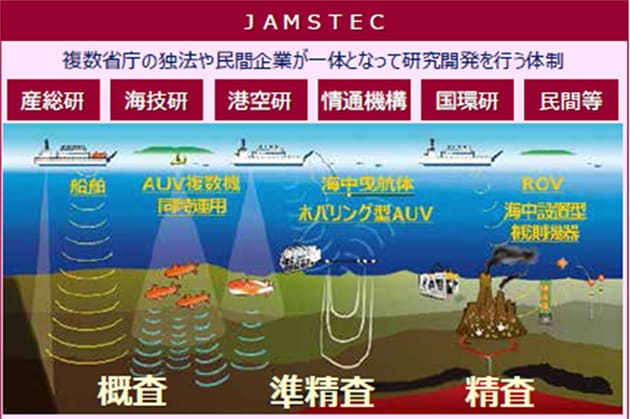
2.SIPにおけるテーマ「次世代海洋資源調査技術~AUV複数機同時運用」
我が国は世界第6位の広大な排他的経済水域(EEZ)を保有し、豊富な海底資源があると言われている。これらの調査のためにAUV(Autonomous Underwater Vehicle)、あるいはROV(Remote Operate Vehicle)と呼ばれる深海無人探査機が地形、地質海底構造や水温、塩分濃度、圧力等様々な海洋データを高精度に取得する。従来は、大型の母船がAUV/ROVを追従しながら海洋データ等の送受信を行ってきたが、数百万円/日と言われる母船のオペレーションコストが課題となっている。
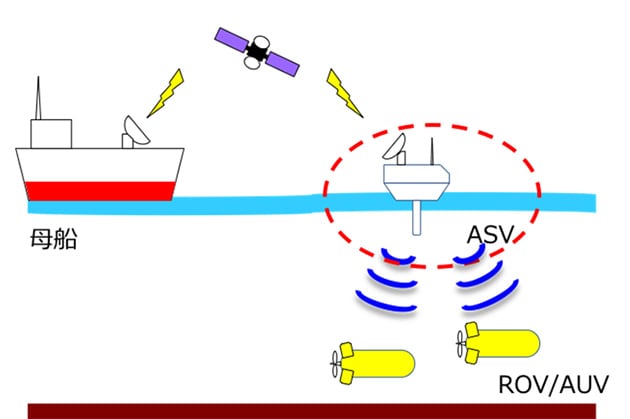
この課題解決のため、母船に代わりASVを海上移動中継局として用い、さらに複数のAUV/ROVをトラッキングすることでより低コストかつ高効率な調査を目指している。本稿においては、主にASV開発に向けた設計及び製造面での課題とその解決について紹介する。
3.ASV概要
3.1.ASVとは
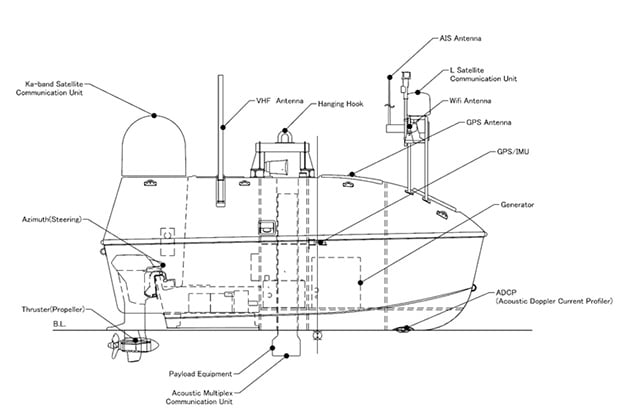
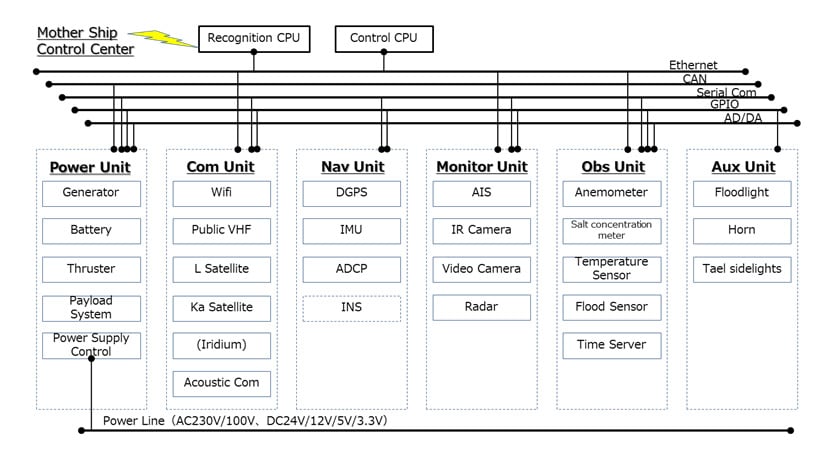
今回開発したASVの仕様を下記に示す。ASVは音響多重通信装置を介して、ROV/AUVと通信を行い、必要な情報のみを陸上無線を用いて母船へと伝送する。
表1 主要諸元
| 項目 | 規格 |
|---|---|
| サイズ | 4.45m×1.95m 程度 |
| 重量 | 1.87トン程度 |
| 速力 | 0~5ノット |
| 航行時間 | 48時間以上 |
| 動力源 | ディーゼル発電機/2次電池 |
| 航海計器等 | 衛星測位装置(DGPS)、慣性計測装置(IMU)、流速計(ADCP)、音響多重通信測位装置(SSBL) |
| 通信設備等 | 無線LAN(Wi-Fi)、Lバンド衛星通信装置、Kaバンド衛星通信装置、公共ブロードバンド無線装置、イリジウム通信装置 |
| 監視装置等 | IRカメラ(1機)、120°広角HDカメラ(3機)、レーダー(1機)、AIS(1機) |
3.2.ASVの課題
(1)無人化のための通信
本機は無人であるため、通常の船舶と異なりその制御は下記に大別される。
- 母船の管制装置から制御を行う(遠隔制御)
- 母船の管制装置から発行されるシナリオを受信した機内CPUが制御を行う(遠隔監視)
一方、海上での通信環境は陸上での通信環境と比較すると脆弱であり、母船と機内の通信を円滑に行うことは難しい。
(2)航続時間と船速
要求事項にある連続航行「48時間」という大きな課題があった。
具体的には、次の通りである。
- 機体の軽量化
- ペイロードの抵抗を含めた機体抵抗の軽減
- 電力計算
- 周囲への接触を考慮した高強度機体
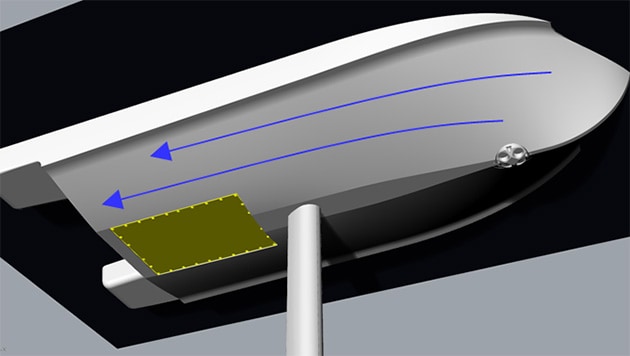
(3)音響通信装置へのノイズ影響の低減
ASVの機体には動力源であるエンジン発電機と推進機が搭載されており、機体外板が振動して振動が海中に伝達される。
この振動がノイズとなり機体下部に設置されたペイロードの音響通信装置に影響して通信に障害をもたらす。
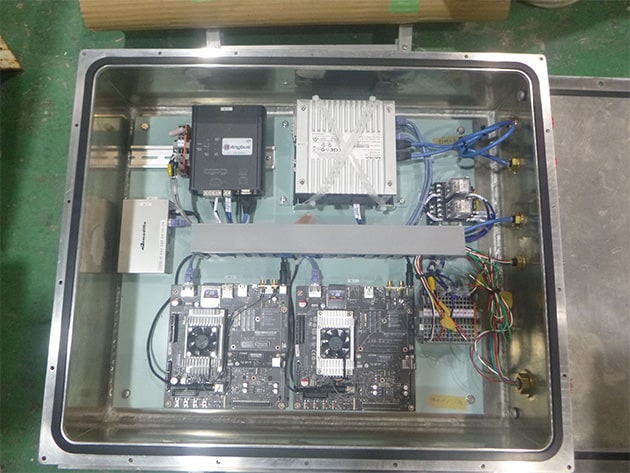
(4)CPUの誤作動防止
CPUの誤作動防止のため、周辺温度の冷却と結露防止が必要であった。無人船として、CPUの誤動作に対しては高度な技術的対処が必要である。
また、ASVは海洋で使用されるため水密性の確保が絶対である。
(5)自己復原性
有人船の場合、操縦者が周囲の波浪、風浪に対して、無意識のうちに操船技術で対処している。それに対して、無人船の場合その人的対処がないため、転覆の可能性が高くなる。
(6)機体の揚収
有人船の場合の「着岸」であるが、これは船長技量にゆだねられるものである。
一方、無人船の場合はこの機能を織り込む必要がある。
4.ASVの特徴
4.1.開発と設計方針
(1)無人化のための通信
機内の無人化を実現するため、遠隔制御・監視の安定した通信は必須となり、通信の冗長化を行った。これを実現するため、本機では5系統の通信形態を用意している(Wi-Fi, VHF通信, L衛星通信, Ka衛星通信, イリジウム通信)。Wi-FiとVHF通信は母船との直接通信であり、L衛星通信、Ka衛星通信、イリジウム通信は衛星通信である。特にKa衛星通信は大容量通信が可能な衛星通信であり、今後の海上通信において大いに期待されている。本機には、NICT(情報通信研究機構)が開発したKa衛星通信装置を搭載し、母船との通信を確認した。
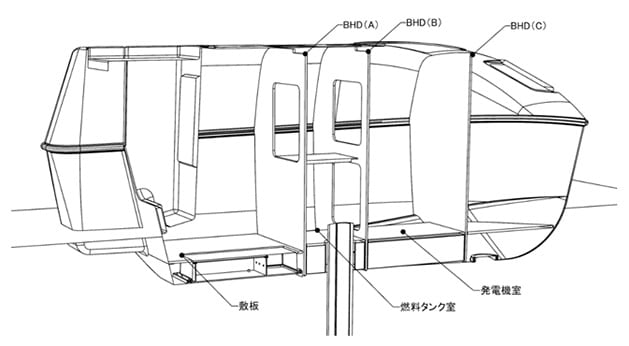
(2)航続時間
機体は高強度による軽量化を実現させる為、単板構造ではなく、真空成形工法によるサンドイッチ構造を採用し剛性を高めた船体構造とした。また、ペイロードの形状長さによる抵抗係数の算定から、実際の試験用モデルを作成し抵抗力計測も行った上で、ペイロード部分の推進抵抗を織り込んだ必要馬力計算を行った。この結果、最適なサイズの発電機、燃料量を搭載しユーザーが求める要求航続時間を実現した。

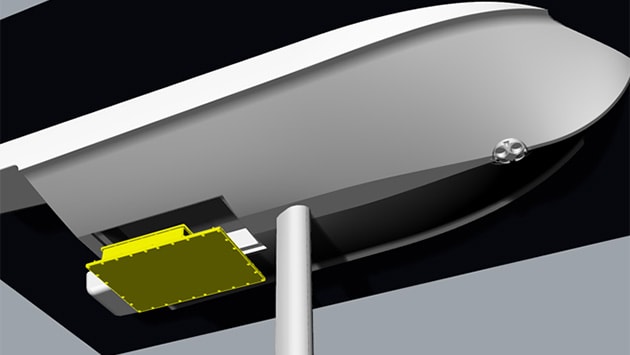
(3)音響通信装置へのノイズ影響の低減
海中の振動は距離の2乗で減衰するため、ペイロードに装着した音響装置を機体外板から1.5m下方へ遠ざける。
揚収と母船上での保管と輸送のため本機体においてはペイロードの電動上下収納方式を採用した。
(4)CPUの誤作動防止
熱伝導率の高いアルミ製のCPUボックスを採用して機体外板に取付けて直接海水で冷却することで冷却性を高めた。
ボックスは水密性の高い構造を採用してIP68保護等級相当を保つことができ、N2ガスの充填により水分を追い出し結露防止対応も実施した。
(5)自己復原性
機体の形状は、自己復原しやすい全閉囲型のカプセル形状にした。機器類の配置位置を慎重に検討する事で重心位置を低く設定した。浮心位置と重心位置の関係によるRighting Armがマイナス(-)方向にいかないように上部構造形状の設計、重量重心計算を何度も見直した。これにより、機体が水面上で直立状態から180度横転した場合であっても正の状態に自己復帰する事をシミュレーションで確認した。
(6)機体の揚収
着水揚収で重要となるのは、船上での取り回しである。本稿で紹介するASVは、JAMSTEC様が構築した着水揚収システムに沿った設計としている。実際の運用では、機体が波風による影響を受け非定常的な動きをする。従い、機体の吊り上げ金具、船体強度検討をする際には想定する範囲が格段に広くなる。


4.2.実証機の検証(2017年度の実証試験の振り返り)
(1)実証試験の概要
戦略的イノベーション創造プログラム(SIP)・海のジパング計画の課題のひとつである「AUVの複数運用手法等の技術開発」における洋上中継器の実証機(ASV)の海域試験である。
(2)実証試験の補助業務での気づき
ヤンマー造船としてASV実証機の海域試験における補助業務に参加したのは、2017年2月、10月である。乗船した母船は、JAMSTEC様が運用する調査船「かいれい」、「かいめい」であった。実証試験で気づいた事は、機体は海底資源調査に使用される道具であり、扱いやすさが重要である点であった。
母船の甲板スペースには限りが有り、一度の航海で多くの調査・研究案件をもっている。従って、調査のための運用作業は、より効率的、かつ安全に遂行する事がひとつのポイントであると言える。又、機体は無人ロボットであり、機体内に入っての確認・準備作業を実施する事は好まれない。
機体を洋上へ着水させる前には、全ての機器の動作確認及び通信確認を甲板上で行うが、限りある時間の中で準備に多くの時間を必要とするものは道具としては扱いにくいものと実感した。
(3)実証試験での学び
ヤンマーは、プレジャー艇、業務艇、漁船を製造している。これらは、船の船速、操縦性、居住性、デザイン性、快適性が重要視される。
洋上中継器ASVは、海中で潜航するAUVと母船間の確実且つ安定した通信が重要であると言う事を学んだ。従って、ユーザーが機体を運用するにあたっては必ず機器が動作しノイズの無い良好な通信状態である事が最も重要となる。また、荒天時で有っても運用途中に故障しないと言う信頼性が大切であり安心して海域試験を遂行できるものでなければならない。
(4)成果
洋上での実証試験において、JAMSTEC様は洋上中継器の実証機ASV(ヤンマー製)によるAUV複数機運用による海底下構造調査に初めて成功した。
(5)今後の課題
機体内をより良い環境とするための熱・湿度対策、さらに長い航続時間の確保、通信機器での大容量データを短時間で送受信できる手法が課題と言える。
機体内には、多くの電子機器が搭載されており、ASV起動中は発電機、バッテリー、変圧器、モーター等が発熱体となり、真夏日や水温の高い熱帯海域では様々な工夫と知恵が必要である。
通信機器では、多くの調査・画像データを送受信する通信速度を高める必要がある。さらに長い航続続時間の確保については、信頼性の高い認識技術を使った夜間対応が課題である。
5.おわりに
冒頭に記述したように「小型船舶における安全性の確保」は、舟艇事業を継続する上で最重要技術課題である。また、本課題を克服できればその付加価値により、業界をリードできる商品ができると確信している。
今回は、ヤンマー中央研究所に牽引された部分が多いが、無人船として一歩踏み出せたことは大きな成果である。引き続き、無人航行技術構築のため努力していきたい。
謝辞
本研究(の一部)は、総合科学技術・イノベーション会議のSIP(戦略的イノベーション創造プログラム)「次世代海洋資源調査技術」(管理法人:JAMSTEC)の一環で実施されました。
参考文献
- (1)百留 忠洋・ほか, 洋上中継器の実証機(ASV)試作機から実証機の開発へ, 第35回日本ロボット学会学術講演会予稿集
- (2)杉浦 恒, ロボティックボート実証機の開発, マリンロボティックスの現状, 日本機械学会, Vol.121, 10月(No.1199), (2018)
- (3)内閣府 web(https://www8.cao.go.jp/cstp/gaiyo/sip/index.html), 戦略的イノベーション創造プログラム(SIP), 研究開発計画第1期 11課題, 次世代海洋資源調査技術 概要
- (4)JAMSTEC web, プレスリリース,2018年8月24日
著者
