JavaScript is disabled on your browser. Please enable it to browse this site correctly.
Products & Services
Agriculture
Agriculture Top
Smart Agriculture
Tractors
Combine Harvesters
Rice Transplanters
Tillers
Recreational Marine
Recreational Marine Top
Products Lineup
Marine Engine
Recreational Boat
Premium Cruiser
Marine Equipment
News
Event
Become a dealer
Marine Commercial
Marine Commercial Top
Product Lineup
Product Lineup Top
Propulsion Engines (High Speed)
Propulsion Engines (Medium Speed)
Auxiliary Engines
SCR System
Dual Fuel Engine
Two-stage Turbocharging System
Electric Propulsion System
After-Service
Production System
Fundamental Research / Product Development
Life Cycle Value
Energy Systems
Energy Systems Top
Gas-Engine Heat Pump (GHP)
Cogeneration Systems
Power Generation
Customer Case Studies
Power EPC
Compact Equipment
Compact Equipment Top
Products Lineup
Excavators
Wheel Loaders
Carriers
Attachment
SMARTASSIST Remote
Our Factories
Technical Feature
Promotional Gallery
Yanmar Construction Equipment co., ltd.
Industrial Engine
Industrial Engine Top
Products
Vertical Water-cooled Diesel Engines
Vertical Water-cooled Gas Engines
Air-cooled Diesel Engines
Horizontal Water-cooled Diesel Engines
New Products
New Products Top
Gas Engines for Off-Road
High-power Diesel Engines
Fundamental Research
Product Development
Production System
Business Outline
Power Generation
Power Generation Top
Solutions
Solutions Top
Hybrid Energy
EPC
Combined Heat and Power (CHP)
Bio Energy
Stable Power
Products
Products Lineup
Diesel
Gas
Bio
Project References
Compact Power Products
Compact Power Products Top
Diesel / Gas Generators
Diesel / Others
Dealer Locator
Support
Support / Contact
Documents
FAQ
Contact
After Sales Service
About Us
Top
Message from the President
Our Mission
Business Areas
Technology
Company Profile
History
CSR / Environment
Sports
Financial Results
Y media
Search
Home
About YANMAR
Technology
YANMAR Technical Review
YANMAR Technical Review - Latest
Technical Papers
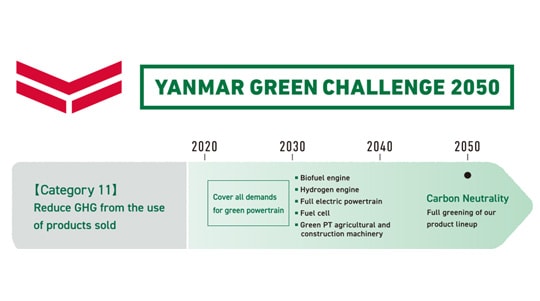
Development of Engine Technologies for Carbon-Neutral Fuels
Marine Commercial
Energy
Engine
Technology
Topic 1: Second Report on GHG Emission Reductions from Use of Ammonia Engines Computational Approach to Assessing Emissions of NH
3
-Diesel Dual-Fuel Engine
Marine Commercial
Technology
Topic 2: A Study on Combustion Improvement in Dual-fuel Engine for Biogas Applications
Energy
Technology
Topic 3: Development of TNG Series Spark-Ignition Engines for Industry Development of Technology for Multi-Fuel Operation in Anticipation of Decarbonization
Engine
Technology
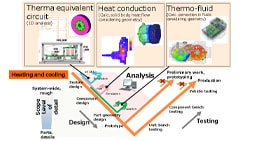
Motor Thermal Analysis for Electrification of Machinery Thermal Analysis of Electric Motors Using Finite Element Method and Thermal Equivalent Circuit
Component
Technology
Solutions for Reliable Oyster Farming Production Use of Biotech Practices
Recreational Marine
Technology
Development of Agricultural Spraying Method with Reduced Spray Use and Improved Leaf Coverage Innovative New Technique for Tractor-Mounted Sprayers
Agri
Technology
Product Technology
Achievement of Ultra-Low Noise on New ViO80-7 Hydraulic Backhoe
Compact Equipment
YH700M Full-Feeding Combine Harvester Development of Combine Harvester for Low-Cost and Efficient Harvesting of Crops Other than Rice
Agri
Development of Emergency Generators that Resolve Value Chain Issues Remote Monitoring Services that Reassure Customers
Energy
YC100 Composter for Resource Recycling Food Production
Energy
Technology
Other Articles
Editor's Postscript
Show Archive
Downloads
Dealer Locator
Contact
Follow Us
Share this page
Facebook
Twitter
LinkedIn
Email
Inquiries and Support
Catalog Download
FAQ
Dealer Locator
Contact
 Agriculture
Agriculture
 Recreational Marine
Recreational Marine
 Recreational Boat
Recreational Boat
 Premium Cruiser
Premium Cruiser
 Marine Equipment
Marine Equipment
 Marine Commercial
Marine Commercial
 Propulsion Engines (High Speed)
Propulsion Engines (High Speed)
 Propulsion Engines (Medium Speed)
Propulsion Engines (Medium Speed)
 Auxiliary Engines
Auxiliary Engines
 SCR System
SCR System
 Dual Fuel Engine
Dual Fuel Engine
 Two-stage Turbocharging System
Two-stage Turbocharging System
 Electric Propulsion System
Electric Propulsion System
 Energy Systems
Energy Systems
 Compact Equipment
Compact Equipment
 Industrial Engine
Industrial Engine
 Power Generation
Power Generation
 Compact Power Products
Compact Power Products