Development Dept.
KANZAKI KOKYUKOKI MFG. CO., LTD.
YANMAR Technical Review
Marine Gears: Technology for Enhancing Vessel Comfort
Abstract
Yanmar marine gears perform the essential role of transmitting power from the engine to the propeller. Basic functions include the transition between neutral and engaged and between forward and reverse propeller rotation. Keeping these transitions smooth is vital for comfortable vessel operation. This report describes the marine gear technologies that Yanmar has developed to satisfy these requirements.
1.Introduction
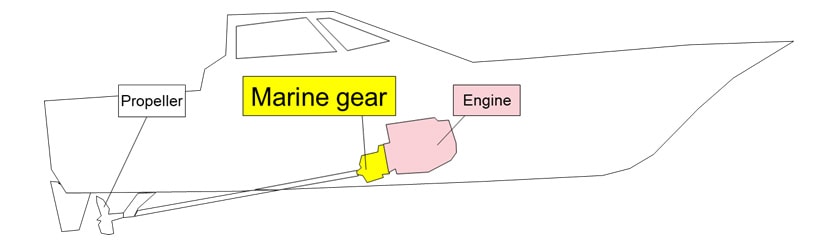
Yanmar powerboats are equipped with highly reliable diesel engines that combine high output with fuel efficiency, with notable models including fishing boats that feature distinctive styling and enhanced comfort with interiors on a par with those found in cruisers. Yanmar also equips commercial fishing boats and other non-recreational vessels with diesel engines that feature high output and excellent durability (see Fig. 1).

Marine gears perform the essential role of transmitting power from the engine to the propeller (see Fig. 2). They also provide a smooth transition between transmitting and not transmitting engine power (between in gear and neutral) and between propeller rotation directions (forward and reverse), and play a role in ensuring quiet vessel operation by minimizing gear noise and vibration at low engine speeds. Together, these requirements mean that marine gears are fundamental to the functioning of the vessel. This report describes the technologies used in marine gears to provide these core functions.
2.Basic Design
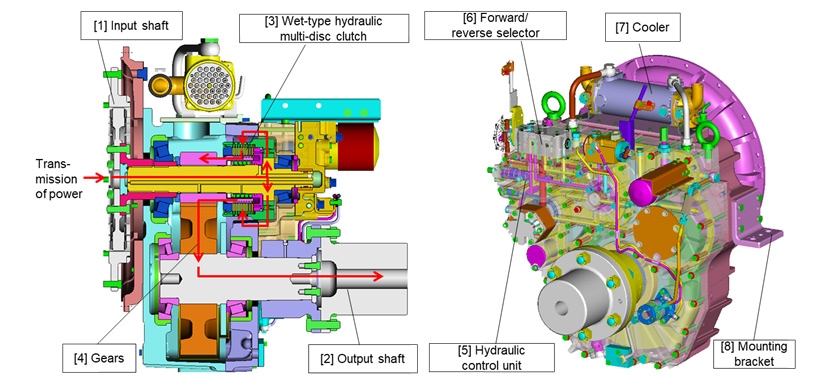
The main parts that make up a marine gear are: [1] the input shaft that is driven by the engine, [2] the output shaft that drives the propeller, [3] a wet-type hydraulic multi-disc clutch that engages and disengages power transmission to the output shaft, [4] the gears that reduce the drive from the engine to the required shaft speed, [5] the hydraulic control unit that determines the pressure of the oil supplied to the clutch, [6] the forward/reverse selection mechanism for the output shaft, [7] the oil cooler, and [8] the mounting brackets that transmit the propulsion from the propeller to the vessel (see Fig. 3).
3.Design and Operation of Wet-Type Hydraulic Multi-Disc Clutch
3.1.Operation of Clutch when Disengaged
The wet-type hydraulic multi-disc clutch is made up of alternating pairs of [9] friction plates (FPs) and [10] steel plates (SPs), [11] a hydraulically driven piston that is aligned with the input shaft, and [12] a return spring that moves the piston back to its default position when the hydraulic pressure is removed (see Fig. 4). Fig. 4 shows the case when the FPs are connected via a gear to the mechanism that drives the output shaft and the SPs are connected to the mechanism that transmits power from the engine such that they rotate in sync.
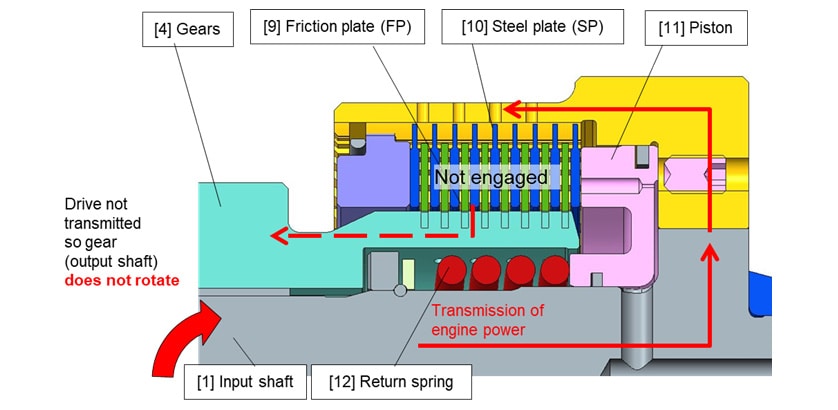
The clutch is designed such that there is a gap between the FPs and SPs when the piston is in the default position (no hydraulic pressure applied), meaning that while the SPs rotate in sync with the engine, this rotation is not transmitted to the FPs. Accordingly, the output shaft does not rotate.
3.2.Operation of Clutch when Engaged (Forward or Reverse)
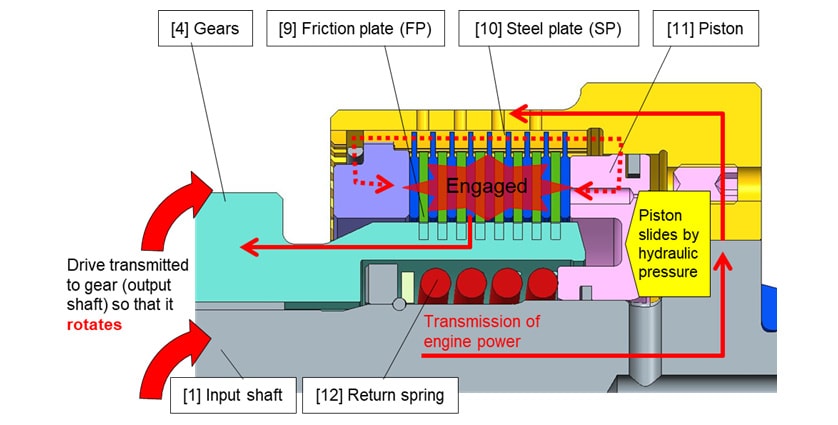
Shifting the lever of the forward/reverse selection mechanism to the forward (or reverse) position actuates the hydraulic circuit in the mechanism and starts to apply hydraulic pressure to the clutch piston. Driven by this hydraulic pressure, the piston starts to slide along its axis until the gap between the FPs and SPs is eliminated and the clutch engages (see Fig. 5). This causes the FPs and SP to rotate in sync and transmits the engine power from the input shaft via the gears to the output shaft. This is what is meant by expressions such as “engaging the clutch” and “letting out the clutch”.
4.Hydraulic Control of Marine Gear
4.1.Hydraulic Control when Clutch Engaged
As explained above, operating the lever of the forward/reverse selection mechanism engages the clutch to deliver the engine power to the output shaft, thereby propelling the vessel forward or backwards. The problem is that applying too high a hydraulic pressure to the piston when engaging the clutch causes the propeller speed to increase too quickly, resulting in a grinding/banging sound and jolting the vessel.
To prevent this sudden increase in propeller speed, the hydraulic control unit [5] in the marine gear includes a proprietary pressure regulator called a smooth-engaging valve.
The smooth-engaging valve has two springs [13] with different strengths inside the valve [14] and uses a spool [15] that is tensioned by these two springs to regulate the pressure (see Fig. 6). When the forward/reverse lever is operated, oil starts to enter from the left side of the valve, thereby causing the valve to start sliding as the quantity of oil builds up. After sliding a certain distance, the tension due to the other spring starts to act on the spool and the pressure builds in proportion to the magnitude of this tension.
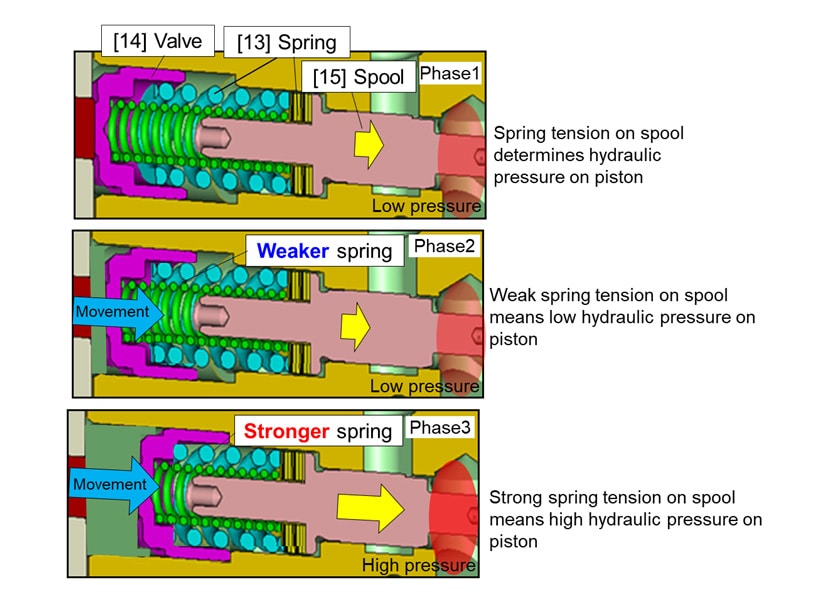
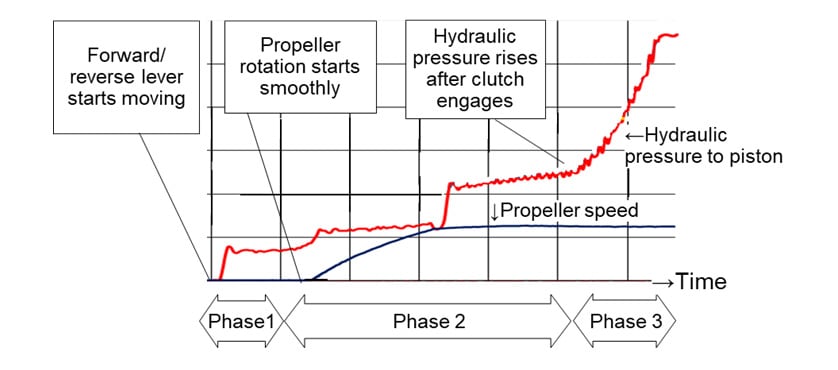
Fig. 7 shows a waveform graph of the measured hydraulic pressure to the piston and propeller speed when the forward/reverse selection lever is operated. The following explanation considers each of the three successive smooth-engaging valve positions in turn (see Fig. 6).
- Phase 1:
- Immediately after the forward/reverse selection lever is operated, only the inner (weaker) spring acts on the spool and therefore the hydraulic pressure driving the piston is low.
- Phase 2:
- The hydraulic pressure remains low as the valve moves. This ensures a smooth start to propeller rotation, which commences at this point.
- Phase 3:
- When the valve reaches a certain point, the tension of the stronger of the two springs starts to act on the spool causing the hydraulic pressure to rise. As this higher pressure brings the FPs and SPs into full engagement, it transmits full power from the high-output engine to the propeller.
By integrating this pressure regulation mechanism in one place and along a common axis, Yanmar has succeeded in miniaturizing the hydraulic circuit of the marine gear.
4.2.Use of Hydraulic Control to Minimize Gear Noise and Vibration at Low Speeds
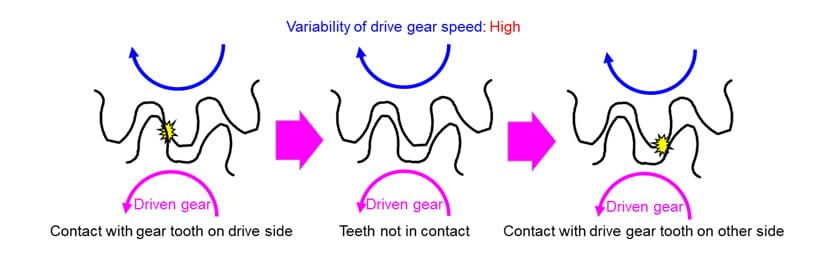
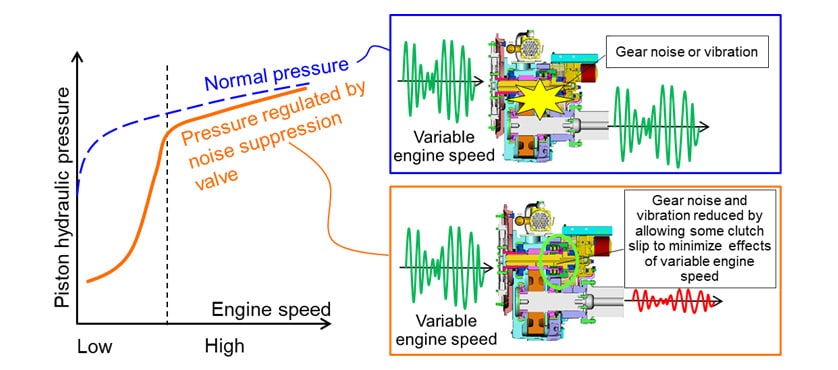
Diesel engine operation tends to become more variable when running at low speeds, resulting under some conditions in gear noise or vibration due to the drive-side and rear-side of the gear teeth alternately coming into contact with the teeth of the opposing gear (see Fig. 8). To avoid this gear noise or vibration, marine gears are equipped with a pressure regulation mechanism called a noise suppression valve that is attached to the forward/reverse selection mechanism [6].
The noise suppression valve reduces the hydraulic pressure to the piston to allow a small amount of slip between the FPs and SPs when the engine is running at low speed, minimizing gear noise and vibration by reducing the effect that speed variability has on the meshing of the gears (see Fig. 9).
4.3.Hydraulic Control for Running Vessel at Low Speed
A requirement common to different types of vessels is to run the propeller at a speed that is even slower than the speed at which the clutch engages. Examples include using a fishing boat for trolling or slowing down to bring in a catch. While shifting between forward, neutral, and reverse to replicate a lower engine speed is one way to maintain the desired vessel speed in such cases, Yanmar marine gears are equipped with a trolling valve that enables this low-speed propulsion (see Fig. 10).
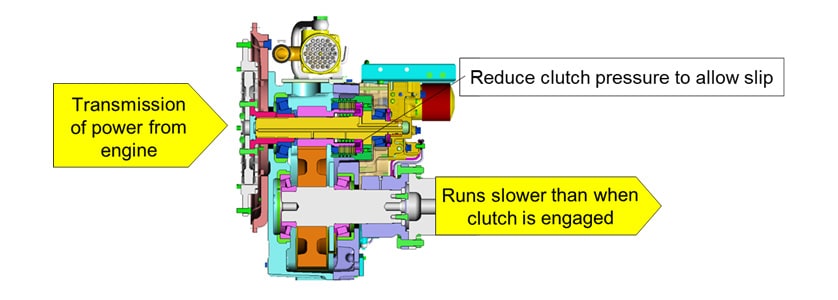
Like the noise suppression valve, a trolling valve works by deliberately reducing the hydraulic pressure to the piston to allow slip between the FPs and SPs, thereby slowing the rotation of the propeller below its normal speed. Trolling valves can be either mechanical or electronic. The former works by mechanical control of pressure based on the physical position of a lever that specifies the target propeller speed. As the pressure is directly determined by the lever position, it is prone to external influences (such as the effects of wind or current, or of differences between vessels).
An electronic trolling valve includes the parts shown in Fig. 11: [16] an input device that specifies the target shaft speed, [17] a sensor that measures the actual propeller speed, [18] a proportional solenoid valve that controls the hydraulic pressure to the piston, and [19] an electronic control unit that controls the solenoid valve.
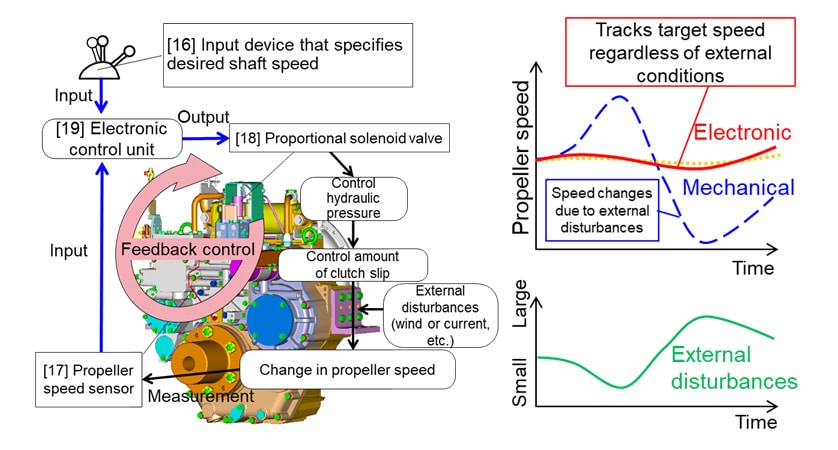
The electronic trolling valve works by feedback control whereby the pressure of the proportional solenoid valve is adjusted to eliminate the speed disparity (the difference between actual propeller speed and the target speed set by the input device). This means that it is able to maintain the target propeller speed regardless of changes in external conditions.
The electronic trolling valve also provides the electrical control of pressure described in section 4.1 and it can be controlled from a PC, allowing detailed settings to be applied such as the length of time to output at a particular pressure. This allows optimal settings to be used depending on the vessel type (allowing for different hull sizes, weights, and so on), something that would be difficult to achieve using the smooth-engaging valve, while also providing for fine tuning to suit customer preferences (customers may want a rapid clutch engagement regardless of the jolting this causes, or conversely may want to eliminate this jolting as much as possible).
5.Conclusions
While they are the sort of features that tend to be taken for granted in a powerboat, the core marine gear functions described in this report are the result of ongoing efforts to improve performance and reliability. As marine gears are also subject to numerous other requirements beyond those described here, Yanmar intends to continue advancing the associated technology as it strives to deliver solutions to the challenges customers face.
-IMPORTANT-
The original technical report is written in Japanese.
This document was translated by Research & Development Management Division.
Author
