Advanced Development Division
Development Division
YANMAR AGRIBUSINESS CO., LTD.
YANMAR Technical Review
YANMAR’s Controlled Fertilization: You Can Implement a Fertilization Planning!
Abstract
More uniform crop growth is a key to achieving higher yield and quality. While past practice has been for the rice transplanter operator to adjust fertilizer application manually, this requires familiarity with the field and equipment. In response, Yanmar has developed a controlled fertilization system that anyone can use. This system equips the rice transplanter with a controlled fertilization function for applying fertilizer based on a map that specifies the amount for each location in the field. Yanmar also supplies a fertilization planning system that simplifies creation of the fertilization map. By using this system, even unskilled equipment operators can perform controlled fertilization.
1.Introduction
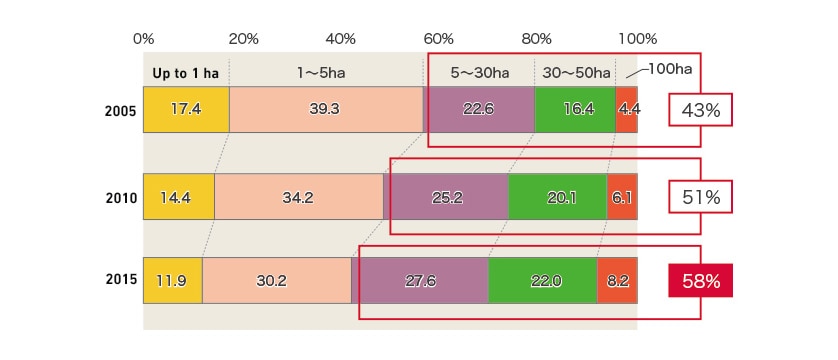
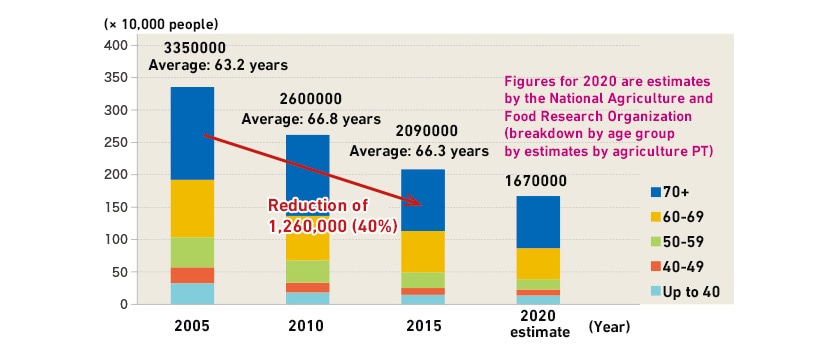
The proportion of Japanese farms run by large agricultural businesses is slowly rising (see Fig. 1) as farm field is increasingly consolidated by accredited farmers. This can be seen as a positive development that will help address the shrinking size of the agricultural workforce due to its aging demographics (see Fig. 2).
A consequence of rice paddies and fields getting larger is that there is more work for each agricultural worker to do, making it difficult to maintain past levels of harvest size (yield) and quality.
As much farming work demands skills and knowledge gained through experience, this is not a problem that can be overcome quickly by recruiting new agricultural workers. In response, Yanmar is seeking to supply agricultural machinery and services that enable anyone to perform farm work to the level of an experienced farmer. This article describes one such example in the form of Yanmar’s controlled fertilization.
2.Controlled Fertilization
Controlled fertilization is a way of adjusting how much fertilizer is applied to each area of field. This section describes why controlled fertilization is needed and the challenges it poses.
2.1.Need for Controlled Fertilization
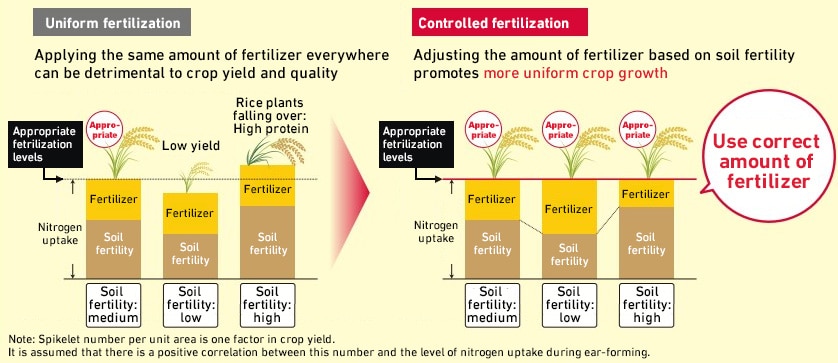
As fertilizer application is spread on field to augment its soil fertility (productivity in terms of the amount of crop it is able to produce), the quantity of fertilizer used needs to be determined based on this fertility. A lack of fertilizer will result in a lower yield due to poor crop growth, whereas too much fertilizer not only adds to costs, but can also be detrimental to crop quality.
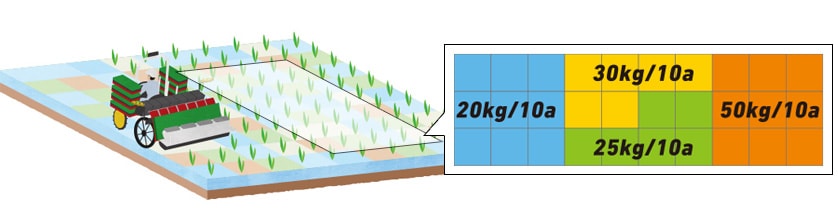
Soil fertility varies not only between fields, but also across different places of the same field. In other words, applying the same amount of fertilizer across an entire field will affect growth by differing amounts depending on the soil fertility at each location, causing variation in crop yield and quality. It is to avoid this problem that controlled fertilization is needed. By adjusting the amount of fertilizer based on the soil fertility at each location, controlled fertilization can optimize spending on fertilizer and improve consistency in yield and quality (see Fig. 3).
2.2.Challenges of Controlled Fertilization
Two things are needed for controlled fertilization.
The first is good knowledge of the field’s soil fertility. While an experienced farmer who has worked the same field for many years will acquire a sense of how its soil fertility varies, this is not an easy thing to do for someone new to the job.
The second requirement is good knowledge of the fertilizer application machinery. Common current practices for fertilizer application include the fitting of applicators to tractors, rice transplanters, or unmanned helicopters. As controlled fertilization relies in each of these cases on the operator manually adjusting the amount of fertilizer being applied to each area, it can only be done by someone who is proficient in the operation and functions of the machinery being used.
The difficulty of finding people who have a combination of both of these skills is the main obstacle to controlled fertilization.
3.Yanmar’s Controlled Fertilization
This section describes the different components that make up Yanmar’s controlled fertilization solution, the service it provides through its fertilization planning system, and a specially equipped rice transplanter with a side-strip fertilizer applicator (V type).
3.1.Overall Solution Composition
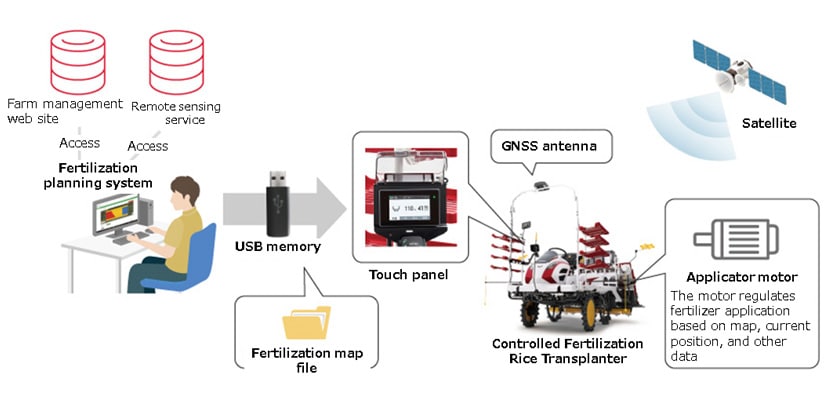
Yanmar’s controlled fertilization solution is made up of its fertilization planning system for generating a fertilization map and a rice transplanter equipped to apply fertilizer in accordance with this map (see Fig. 4). The fertilization map contains data on how much fertilizer to apply in each area of the field. The rice transplanter then combines this map data with its own vehicle data (position and speed) to apply the required amount of fertilizer at each location.
In the past, using controlled fertilization on a hundred fields would have required experienced operators familiar with all of these fields and the equipment being used. With Yanmar’s controlled fertilization solution, the same task can be completed by having an experienced farmer produce the fertilization map and leaving it to less experienced workers to drive the rice transplanters. Moreover, if a number of suitably equipped rice transplanters are available, controlled fertilization can be applied to a number of fields at the same time.
3.2.Fertilization Planning System
The fertilization planning system is an app for creating fertilization maps. The amount of fertilizer to apply to each part of a field is defined by dividing the field into a grid and specifying fertilizer use for each square (see Fig. 5).
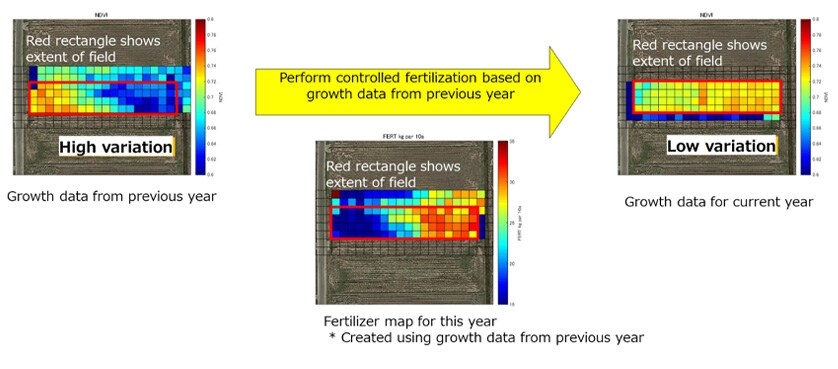
The fertilization map can also be created from growth data acquired from a remote sensing service*1. Variations in soil fertility in each part of the field can be estimated from this growth data to automatically create a map that specifies the application of less fertilizer in locations where soil fertility is high and more where it is low (see Fig. 6). This allows fertilization maps to be created by people who are not familiar with the fields concerned.
To perform variable fertilization, the fertilization map is saved as a file and copied to USB memory for loading onto the rice transplanter.
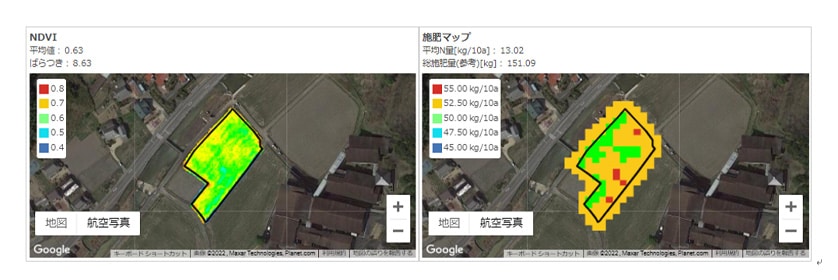
- *1The remote sensing service is visualizing the location-specific information about crop growth and variation in the each field from photography taken by the capture drone.
3.2.1.Procedure for Creating Fertilization Map File
The Fertilization map is made by three-steps described in the Fig.7.
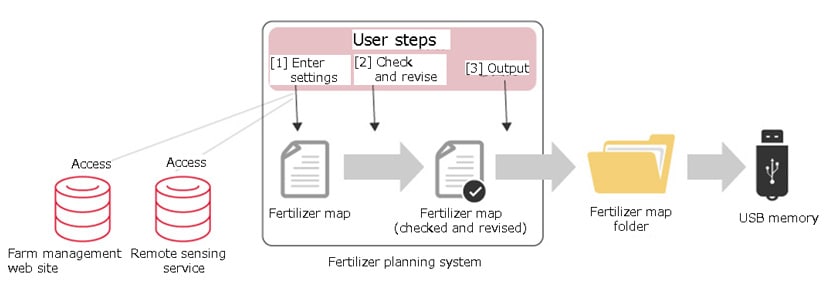
(1) Enter settings
The following three types of information need to be provided to create a fertilization map.
- Field to be fertilized: Specifies the field for which to create a fertilization map
- Additional data: Whether or not remote sensing data is available
- Default fertilizer quantity: The default quantity of fertilizer to apply to the field
The field to fertilize is selected from those registered on a farm management website*2 (see Fig. 8). Additional cropping data from a remote sensing service can also be selected. If this information is not available, the system initially generates the default fertilization map that uses the fixed fertilizer quantity. The default fertilization map can be revised to a fertilization map for controlled fertilization in the next step.

- *2A farm management website is a website on which users can manage their agricultural machinery and field. Fields are registered on the website, which can then be used to enter cropping plans and record farming activity for each field.
(2) Check and modify
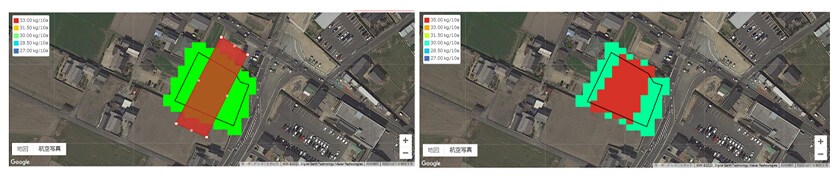
The fertilization map generated from the specified information is displayed over an image of the farm.
To make modifications to the automatically generated map, the user can select a region of the map by means of a range selection and directly specify how much fertilizer to apply (see Fig. 9).
The amount of fertilizer for the field as a whole can also be adjusted.
(3) Output
The checked and modified map is output as a fertilization map file. This file is then loaded into the rice transplanter to perform controlled fertilization. It is also possible to combine fertilization maps for a number of different fields in the same file (see Fig. 10).

3.3.Controlled Fertilization Rice Transplanter
This section describes the equipment fitted on the production-model rice transplanter used for controlled fertilization.
3.3.1.Configuration of Production-Model
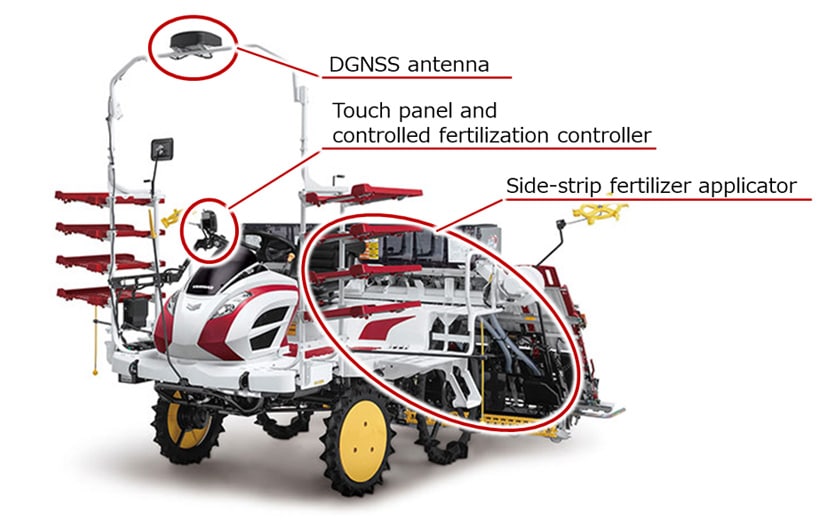
In addition to the side-strip fertilizer applicator mounted on standard rice transplanters, the controlled fertilization model is also equipped with a differential global navigation satellite system (DGNSS) antenna and a controlled fertilization controller with a touch panel interface (see Fig. 11). The following sections describe these three components.
3.3.2.Side-strip Fertilizer Applicator
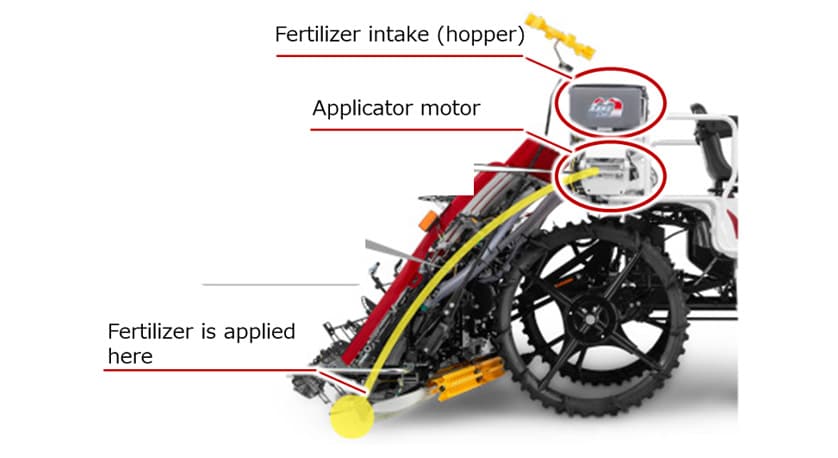
The side-strip applicator is attached to the rear planting unit and fertilizes the seedlings as they are planted (see Fig. 12).
The fertilizer is held in a hopper attached to the applicator. To apply fertilizer, a mechanism on the underside of the hopper is driven by the applicator motor to control the outflow of fertilizer. As the applicator motor speed determines the rate of fertilizer application, running the motor faster applies more fertilizer.
That is, fertilizer application can be adjusted as needed by controlling the applicator motor speed.
3.3.3.DGNSS Antenna
The DGNSS antenna installed on the front of the rice transplanter is used to obtain the position information needed for controlled fertilization (see Fig 13). This position and other data are calculated in real time from the information received by the DGNSS antenna.

3.3.4.Touch Panel and Controlled Fertilization Controller
The rice transplanter is equipped with a touch panel for simple and clear operation, such as switching between fertilization maps (see Fig. 14). The functions of the touch panel user interface include specifying operational settings, loading fertilization maps from USB memory, selecting loaded maps, setting operation mode, and providing audible or visual alarms in the event of a problem (see Fig. 15).
The touch panel also incorporates the controlled fertilization controller. This controller controls the applicator motor speed so as to regulate the rate of fertilizer application in accordance with the fertilization map, performing control calculations based on data from the DGNSS antenna and other sensors.


4.Conclusions
This article has described Yanmar’s controlled fertilization system. Use of the fertilization planning system and the controlled fertilization rice transplanter ensures more reliable crop yield and quality by enabling anyone to perform controlled fertilization as if they were an experienced farmer (see Fig. 16).
A shrinking agricultural workforce in Japan means that supporting new farm workers and reducing the workload of accredited farmers are among the challenges facing the industry. In the future, Yanmar intends to continue working to resolve societal challenges by creating new value in both agricultural machinery and services.
-IMPORTANT-
The original technical report is written in Japanese.
This document was translated by Innovation & Technology Division, Technology Strategy Division.
Author


Electric & Control System Development Division
Development Division
YANMAR AGRIBUSINESS CO., LTD.