သုံးစွဲသူဝန်ထုပ်ဝန်ပိုးကိုလျှော့ချရန်နှင့်စိတ်ငြိမ်သက်မှုနှင့်အတူအလုပ်လုပ်နိုင်သောလူ့အဖွဲ့အစည်းတစ်ခုဖန်တီးရန်စိန်ခေါ်မှုအသစ်
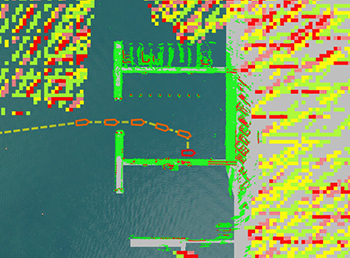
ရေကြောင်းလုပ်ငန်းသည်မြန်မာနိုင်ငံ၏အားသာချက်တစ်ခုဖြစ်သည်။ ကျွန်ုပ်တို့သည်ရှုထောင့်သစ်မှမွေးဖွားလာသည့်ကျွန်ုပ်တို့၏ထုတ်ကုန်များနှင့် ၀ န်ဆောင်မှုမျိုးစုံရှိသောကမ်းလွန်လုပ်သားများကိုဆက်လက်ထောက်ပံ့သည်။ Yanmar သည်“ docking” ကိုအာရုံစိုက်သည်။ ၎င်းသည်သင်္ဘောသွားလာရန်ကျွမ်းကျင်မှုလိုအပ်သော်လည်းအသုံးပြုသူများအတွက်ကြီးမားသောစိတ်ဖိစီးမှုဖြစ်သည်။ အခက်အခဲမရှိလည်ပတ်မှုမရှိဘဲချောမွေ့ပြီးဘေးကင်းလုံခြုံသောသင်္ဘောကျင်းအတွက် "Auto-docking System" နှင့်ပင်လယ်ရေကြောင်းသွားလာမှုကိုထိန်းချုပ်ရန်လုံခြုံသောလမ်းကြောင်းကိုအလိုအလျောက်ဆုံးဖြတ်ပေးသော "Auto-navigation စက်ရုပ်လှေ" ကို Yanmar မှတီထွင်ခဲ့သည်။ ဤစနစ်များ၏ဖွံ့ဖြိုးတိုးတက်မှုသည်အဏ္ဏဝါစီးပွားရေးလုပ်ငန်းအတွက်သာမကအလုပ်သမားများ၏လူ ဦး ရေကျဆင်းနေသည့်ငါးမွေးမြူရေးလုပ်ငန်းအတွက်သာမကကြီးမားသောအကျိုးကျေးဇူးဖြစ်သည့်အပြင်ကမ်းလွန်လုပ်ငန်းများတွင်ပါ ၀ င်သောအန္တရာယ်များကိုအကျိုးရှိစေသည်။ ၂၀၁၇ ခုနှစ်မှစ၍ မြန်မာနိုင်ငံသည်ဤစနစ်များကိုတီထွင်ခဲ့သည်။ ကမ်းလွန်လုပ်သားများကိုအစားထိုးခြင်းနှင့်လျှော့ချခြင်းအားဖြင့်ကမ်းလွန်လုပ်သားများ၏ဝန်ထုပ်ဝန်ပိုးကိုလျှော့ချရန်စဉ်းစားနေစဉ်
အစပိုင်းတွင်ကျွန်ုပ်တို့သည်ဤနည်းပညာကိုမော်တော်ကားများတွင်တွေ့ရသည့်တူညီသောပန်ကာနှင့်ရော်ဘာတစ်မျိုးတည်းအတွက်အသုံးပြုသောနည်းပညာကိုစတင်တီထွင်ခဲ့သည်။ စီမံကိန်းဆက်လက်လုပ်ဆောင်နေစဉ်တွင်တစ်ခုတည်းသော propeller နှင့် single-rudder သင်္ဘောတစ်စီးအတွက် docking ကိုထိန်းချုပ်ရန်ခက်ခဲသောကြောင့်ဖွံ့ဖြိုးတိုးတက်မှုအတွက်လူများစွာနာရီများစွာလိုအပ်သည်မှာရှင်းနေပါသည်။ အကြောင်းပြချက်မှာလေနှင့်လှိုင်းများမှတည်ငြိမ်သောအနေအထားကိုထိန်းသိမ်းရန်အားနည်းချက်သာမကဘဲနှစ် ဦး နှစ်ဖက်လှုပ်ရှားမှုတွင်အင်အားကိုတိုက်ရိုက်အသုံးပြုရန်အတွက်ပြောင်းလွယ်ပြင်လွယ်မရှိခြင်းကြောင့်ဖြစ်သည်။ ထုတ်ကုန်အသစ်ကိုတတ်နိုင်သမျှအမြန်ဆုံးဖြန့်ချိလိုသောကြောင့်ကျွန်ုပ်တို့သည် propeller propulsion ယူနစ်များတပ်ဆင်ထားသည့် propinion unit နှင့်တပ်ဆင်ထားသော twin-propeller နှင့် twin-rudder သင်္ဘောကို အသုံးပြု၍ လူတို့၏နာရီကိုစုစည်းရန်ဆုံးဖြတ်ခဲ့သည်။ သင်္ဘောကိုမည်သည့် ဦး တည်ရာသို့မဆိုရွေ့လျားစေနိုင်သောတွန်းအားဖြန့်ဖြူးသည့်ပစ္စည်းကိရိယာများတပ်ဆင်ခြင်းနှင့် ၂၀၁၅ ခုနှစ်တွင်ကျွန်ုပ်တို့တီထွင်ခဲ့သော dynamic positioning system ကိုအသုံးပြုခြင်းအားဖြင့် Yanmar သည် Auto-docking နှင့် Auto-navigation system အတွက်အခြေခံနည်းပညာကိုနောက်ဆုံးတွင်ပြီးစီးခဲ့သည်။ * လှေကိုသမုဒ္ဒရာရှိဆိပ်ခံတံတား၊ ဖောင်၊ သို့မဟုတ်ကမ်းခြေသို့ချဉ်းကပ်ရန်။