ヤンマーアグリ株式会社 開発統括部 開発企画部
ヤンマーテクニカルレビュー
自動運転農機「ROBOT TRACTOR」の紹介
~持続可能な農業を実現する、ヤンマーのテクノロジー。~
Abstract
Yanmar "Robot Tractor" can drive and work in the farmland along a predetermined path accurately and safely by using the positioning technology, which determines the current location and corrects positioning error, and safety technology, which detects and shows obstacles in blind-spots under visual observation. A tablet user interface that provides intuitive operation makes control of the tractor easy.
This article describes functions and technologies incorporated in "Robot Tractor", the first product in its "Smart Pilot" series of self-guided agricultural machines. ("Smart Pilot" is the brand name for product lines that incorporate Yanmar's self-driving technology).
1.はじめに
農業を取り巻く環境は厳しく、農業人口の減少と高齢化が今後更に加速していく。ヤンマーでは、「A SUSTAINABLE FUTURE~テクノロジーで、新しい豊かさへ。~」をテーマにおいて「持続可能な農業」の実現に向け「農業を食農産業へ発展させる」ことを目指している。そこでヤンマーグループの技術を集結し、高精度自動走行技術、直感的な操作性、安全性確保技術の研究開発を進め自動運転農機シリーズ「SMART PILOT(ヤンマーの自動運転技術を搭載したシリーズのブランド名)」の第1弾として「ROBOT TRACTOR(以下「ロボトラ」という。)」を商品化した。
2.商品概要
ヤンマーのロボトラ(図1)は、独自開発のGNSS(Global Navigation Satellite System)ユニットを搭載し、タブレット端末を用いて圃場内の決められた経路を自動的に走行するトラクタである。ロボトラとオペレータが運転するトラクタ(以下「有人トラクタ」という。)の2台を1人のオペレータが協調運転して農作業を行うことが可能なシステムである(図2)。また、農林水産省が制定した「農業機械の自動走行に関する安全性確保ガイドライン」に沿う安全装置を装備することで、使用者監視下においてロボトラ単独による農作業を行うシステムにも対応している。さらにロボトラ機能だけでなく、オートトラクタ機能(オペレータが搭乗した状態での自動運転機能)と自動操舵機能を装備してお客様のニーズに合わせた作業が可能である。
ロボトラで作業した時の作業履歴はICT(Information and Communication Technology)を活用したヤンマーのスマートアシスト(機械の情報などをヤンマーのデータサーバーに蓄積して農業経営の改善に役立つ情報を管理、分析することができるシステム)で統合管理することが可能である。


3.特徴
3.1.高精度な自動走行制御技術
(1)RTK-GNSS一体型ユニットの開発
ヤンマーが独自開発したGNSSユニット (図3)はロボトラの現在位置を検出するとともに、ロボトラに搭載したIMU(Inertial Measurement Unit)で測位誤差を補正することで高精度な測位制御を行い精密な農作業を可能とする。また、基地局ユニット(図4)は持ち運びが可能な移動式小型基地局として独自開発することで、JAや自治体設置の基地局が設置されていない地域でもロボトラを利用できるようにした。


(2)自動走行制御
RTK-GNSS(Real Time Kinematic-Global Navigation Satellite System)ユニットや各種設定条件、センサ類から得られる情報を基にトラクタの自動走行制御システムと統合制御するアルゴリズムの開発を行った。各種圃場条件での凹凸やトラクタの作業中の状態による位置ズレを防止し蛇行のない高精度な直進走行性能を実現した。旋回制御については、直進制御領域とは別に旋回制御領域を設定し、トラクタの車速やエンジン回転を直進部分と旋回部分で区別することが可能である。旋回領域で予め設定されたトラクタの旋回半径や旋回条件を基に旋回制御のアルゴリズムを開発し、直進部分から旋回部分にスムーズに制御移行することで次の直進部分の走行経路にフラつきなく正確に走行経路に入ることが可能である。
3.2.直感的にわかりやすい操作性の実現
ロボトラのコントロールは、直感的な操作を可能にするユーザーインターフェースを導入したタブレット端末を用いることで容易な操作が可能である。また、タブレット端末の地図情報から、ロボトラの自車位置や管理している圃場の位置を視覚的に確認できるとともに、タブレット端末を用いて圃場登録(図5)、作業機設定(図6)、圃場作業領域設定(図7)、作業経路設定(図8)などの各種設定を行うことで、圃場形状に応じた最適な作業経路を自動で作成し自動運転をスタートすることができる(図9)。お客様自身が煩わしい走行経路などを設定する必要がなく容易にロボトラを使用することが可能となる。さらに、登録した圃場データ等は位置情報と共にスマートアシストで統合管理され、作業履歴として閲覧することができる。





3.3.安全性確保技術の開発
農林水産省が2017年3月31日に策定した「農業機械の自動走行に関する安全性確保ガイドライン」(※詳細は農林水産省のHP参照)に準拠したシステムを構築して安全性確保を行っている。
(1)安全性確保の機能
タブレット端末によるロボトラのスタート・ストップの操作が可能である(図10)。作業中においても予め設定したロボトラの作業速度・エンジン回転数などを圃場条件に応じてその場で最適な設定に変更できる。ロボトラに無段変速トランスミッション(I-HMT)を搭載しているためスムーズな動作で安全かつ効率的に作業を行うことが可能である。
タブレット端末以外に、緊急停止リモコンも装備しておりタブレット端末とは別系統でロボトラを停止可能なシステムを構築して2系統で安全性を確保している。
また、設定した圃場領域からロボトラがはみ出す前、又は直進部分と旋回部分の両方の領域においてロボトラが目標経路からある一定以上の距離を逸脱した場合や各種通信関係の通信が途絶えた場合には、全ての機能を安全に停止する制御アルゴリズムを導入している。

(2)安全装置
ロボトラにはコックピットカメラを搭載し、タブレット端末に表示されたロボトラの前後の映像を確認できる(図10)ため、監視下において目視のみで監視する際に生じる死角をカバーすることができる。またロボトラの周囲の障害物を検知するために、レーザーセンサーと超音波を搭載することでより安全性を確保したシステムを搭載している(図11)。トラクタの作業環境では極力作業を停止させず安全に作業を継続させるために市販のレーザーセンサーに農業機械独自のアルゴリズムを追加した制御を織り込んだ。障害物を検知したらすぐ停止するのでなく、一定条件においてTTC(Time To Collision)による車速制御を用いて衝突予測時間に応じた減速制御アルゴリズムを実現した。

3.4.モジュール設計によるオプション対応
ヤンマーのロボトラは、トラクタ本機の仕様設定以外に既販機へのオプション対応(対応型式の問い合わせ先URL:https://www.yanmar.com/jp/support/contact/)の設定を実現している。ロボトラの導入を容易にすることで自動運転を少しでも身近に使用して頂くために、自動運転に必要な機材のユニット化・モジュール化を実現した。この実現によりオートトラクタ、ロボットトラクタの搭載また、オートトラクタからロボットトラクタへのアップデートと共に、既販機へオプション対応が可能であり、既存のトラクタを活用することが可能である。以上によりLCV(Life Cycle Value:個々の農業機械がその生涯に亘ってどれだけ価値を高めるかの指標)を高めて、お客様にロボトラを導入しやすい環境作りを整えた。
3.5.ロボトラと有人トラクタによる作業メリット
農業人口の減少や高齢化など、農業の抱える課題に対応し、超省力や大規模生産、また誰もが取り組みやすい農業を可能にするため、農作業を「誰でも」「正確に」「効率良く」行えるロボットと人による協調作業の実現を目指している。
ロボトラと有人トラクタでの協調作業のメリットとして、作業効率が大幅にアップすることがあげられる(図12)。
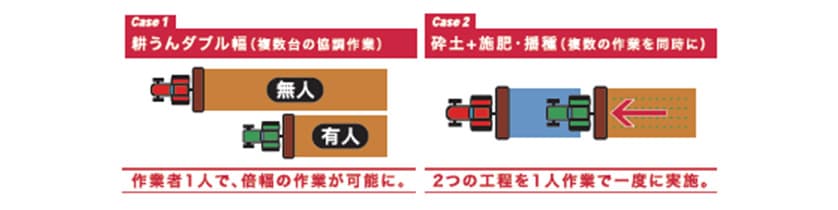
ユースケースの1つ目が、ロボトラと有人トラクタ2台で同じ作業を同時作業することで、オペレータ1人で倍幅の作業が可能になること。また経験の少ないオペレータであってもロボトラの跡を追い、作業していない領域だけ作業を行うことで、正確に直進して作業することが可能になる(図-12Case1)。
2つ目が、2つの異なる作業を1人で同時に行う複合作業が可能となること。例えば、前方のロボトラで耕す作業を行い、随伴しながら後方の有人トラクタは種をまく作業など、複合作業が同時に行えることで作業効率が向上する(図-12Case2)。また同時に2つの作業を完了することで作業時間を大幅に短縮することができ、天候の影響に左右されにくく、より計画的に作業が行える。
4.おわりに
農業現場の課題やお客様の課題を解決するためロボトラの企画がスタートし、ロボトラを商品化するためにプロジェクトを発足し関連部門一丸となってロボトラの開発に着手した。開発コンセプトである(1)高精度自動走行制御技術の実現、(2)直感的な操作性の実現、(3)安全性確保技術の実現を実施し、さらにトラクタ本機の一仕様の設定販売に止まらず、市場にある既販機への後付け搭載を可能にした。
これからロボトラを本格的に販売していく中で、お客様からの評価や要望を基により有効的なシステムへと進化をさせていく。ロボトラで培ったヤンマーのテクノロジーを自社開発トラクタや農作業機械へ展開し、自動運転農機を使用することが当たり前で誰もが容易に利活用できる農業現場を実現していく。
著者
