研究開発ユニット 中央研究所
ヤンマーテクニカルレビュー
モデルベース技術を用いた舶用エンジンの開発
Abstract
This article describes the development of an engine test bed system that simulates actual marine vessel behavior. The test bed system calculates vessel velocity and propeller load based on the equations of motion for the marine propulsion system. The calculated load is then used by the system to control the load on the engine, thereby simulating actual operating conditions. The results from actual vessel tests were used for calibration to determine the system parameters in the motion equations.
Two example applications of the test bed system to marine engine development are described. One is the calibration of transient boost compensation to find out the best condition satisfying acceleration and smoke. Another is an injection control function that minimizes smoke at the initial stages of acceleration.
The article concludes with a discussion of the importance of conducting testing under conditions that engines will encounter in practical use, and the key role of model-based development in achieving this.
1.はじめに
船舶用エンジンは搭載される船舶の用途・仕様によってエンジン使用条件(機関速度、負荷など)が大きく異なる事が知られている。しかしながら開発段階において全ての仕様に対する台上評価が困難であるため、代表的な作動パターンとされている舶用3乗則や2.5乗則などで代替するのが一般的である。これらの負荷パターンは定常航走ではある程度実船航走状態を模擬できるが、半滑走(ハンプ)状態や加速時には実際より負荷が軽く見積もられる場合が多く、正確な評価・適合が困難であった。特にプレジャーボートではアクセル入力に対してダイレクトな加速感が得られる事、加速時にスモークを排出しない事は商品性を支配する重要な要素であり、エンジン開発段階で高いレベルの適合が出来ている事が理想である。このような背景に鑑み、本研究ではエンジン台上にて実船搭載状態を模擬的に実現する仮想評価システム構築を試みた。また、構築したシステムをマリン用エンジン開発に適用した事例について報告する。
2.実験装置
2.1.船舶モデル
(1) 基礎方程式
船舶モデルの基礎式は船体の運動方程式(1)ならびにプロペラ軸等回転系の運動方程式(2)の2つからなっている(1)(2)。以下に式を示す。

 :船体質量[kg]、
:船体質量[kg]、
 :船速[m⁄s]、
:船速[m⁄s]、
 :プロペラ推力[N]、
:プロペラ推力[N]、
 :船体抵抗[N]
:船体抵抗[N]
 :エンジン、ギヤ、軸、プロペラの慣性質量[kgm2]
:エンジン、ギヤ、軸、プロペラの慣性質量[kgm2]
 :エンジン、プロペラの回転角速度[rad⁄s]
:エンジン、プロペラの回転角速度[rad⁄s]
 :プロペラトルク[Nm]、
:プロペラトルク[Nm]、
 :トルク係数[-]
:トルク係数[-]
 :海水密度[kg/m3]、
:海水密度[kg/m3]、
 :プロペラ回転速度[1⁄s]、
:プロペラ回転速度[1⁄s]、
 :プロペラ直径[m]
:プロペラ直径[m]
(1)式においてプロペラ推力は下式(3)で表現できる。

 :スラスト係数[-]、
:スラスト係数[-]、 :スラスト減少係数
:スラスト減少係数
機関速度 とプロペラ回転速度
とプロペラ回転速度 との関係はマリンギヤのギヤ比
との関係はマリンギヤのギヤ比 で関連付けられるため、
で関連付けられるため、

なる式で表現する。なお、 はクラッチの滑り特性を疑似的に表現するために与える係数(クラッチ係数)で、0~1の間の値を取る。
はクラッチの滑り特性を疑似的に表現するために与える係数(クラッチ係数)で、0~1の間の値を取る。
(2) プロペラ特性
前節に出てきたスラスト係数 、トルク係数
、トルク係数 はプロペラ単体性能の指標であり、一般的に図1のような特性を示す。本研究では共にプロペラ前進係数Jに対する1次関数と仮定して式(5)、(6)のように特性をモデル化した。
はプロペラ単体性能の指標であり、一般的に図1のような特性を示す。本研究では共にプロペラ前進係数Jに対する1次関数と仮定して式(5)、(6)のように特性をモデル化した。


なお、プロペラ前進係数Jは下式で定義される。

ここで は伴流係数(wake coefficient)と呼ばれるもので、船体に引きずられて進行方向に流れる船体周囲の海水の速度を船速
は伴流係数(wake coefficient)と呼ばれるもので、船体に引きずられて進行方向に流れる船体周囲の海水の速度を船速 で割った値である。伴流係数は船体形状や航送状態に影響される。
で割った値である。伴流係数は船体形状や航送状態に影響される。
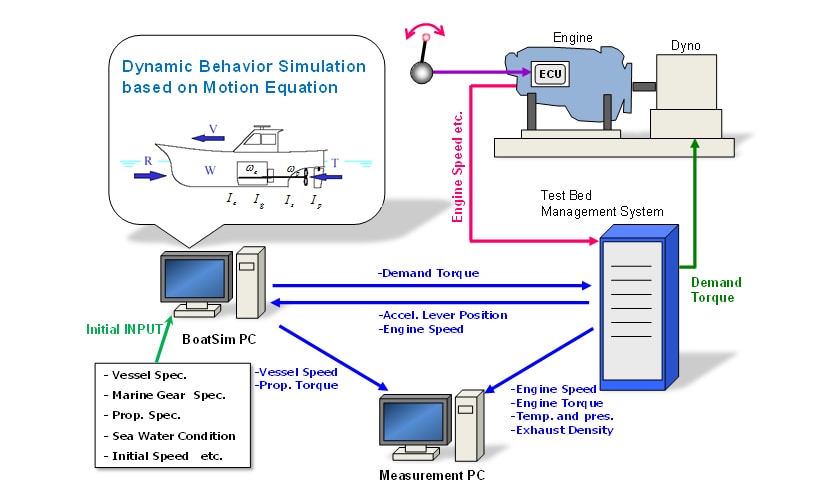
2.2. 台上評価システム
図2は今回構築したエンジン台上評価システムの概要図である。供試エンジンは交流電気動力計(明電舎、THYFREC VT310DY)とマリンギヤ等を介さず直接接続されている。動力計を制御する試験ベンチ制御システムには通常のエンジン性能評価機能に加えて実船挙動をシミュレートするためのPCを増設している。このPCはMATLAB/Simulink上で船舶と軸系の運動方程式を取扱い、時々刻々入力されるアクセル開度とエンジン回転速度を基に仮想船舶における船速やプロペラ負荷を計算する。また、演算されたプロペラ負荷を基に負荷トルクを算出し、試験ベンチ制御に吸収トルク要求値として伝える事で実船搭載相当の負荷をエンジンに与える事ができる。
2.3. Simulinkモデル
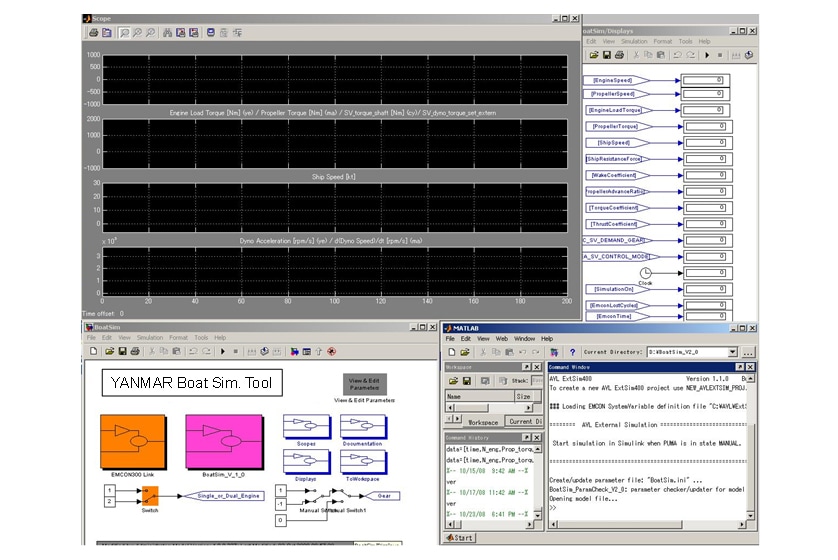
(1) メインウィンドウ
2.1項で提示した基礎方程式を基に船舶挙動を推定するSimulinkモデルを作成した。図3に台上評価システムのメインウィンドウ画面を示す。
(2) システムの同定
本研究では実在する試験艇をモデル船舶として台上評価システムの同定を行った。以下に詳細を述べる。
①クラッチすべり係数 
本研究では定常航走状態ならびに加速状態のみを対象とするため、クラッチすべりは無いと仮定し=1とした。
②伴流係数
定常航走状態においては式(2)の右辺は0となるため、式(8)のように変形する事ができる。従って、実船試験において定常航走時の 、、を測定する事でを求めた。

③船体抵抗 、スラスト減少係数
実船における船体抵抗は船体の形、波浪の状況等によって影響を受ける。また、スラスト減少係数もプロペラ周りのキャビテーション等の影響を受けるため、モデル化が困難である。今回は簡易的にスラスト減少係数を0.2と固定し(3)、式(1)、(3)からモデル艇の定常航走時のデータを基に船体抵抗を求めた。
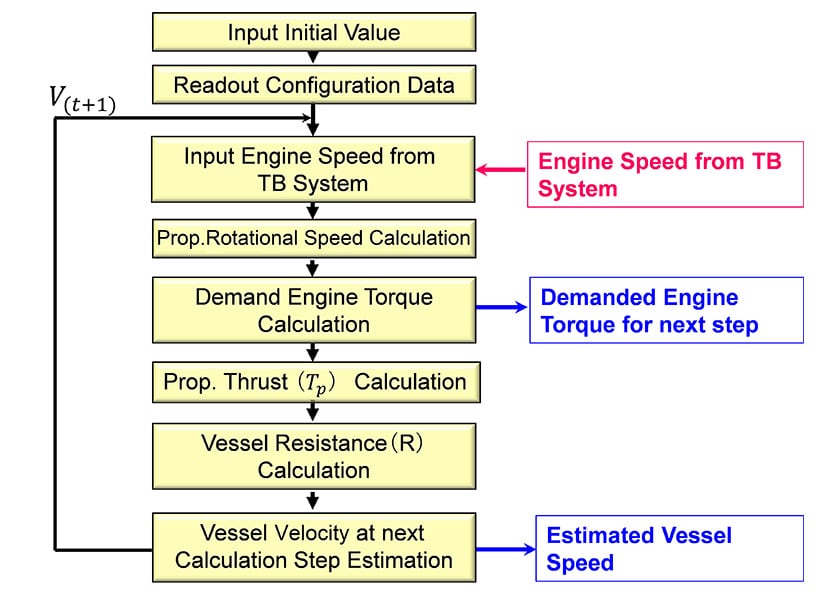
(3) フローチャート
図4に船舶挙動シミュレーションのフローチャートを示す。初期条件を読み込み後、試験が開始されると時々刻々のエンジン回転速度を読み込み、要求エンジントルクを求める。ここで求められた要求エンジントルクは試験システムを通じて動力計負荷に展開される。また、発生したスラストと現時刻の船速を基に次のタイムステップにおける仮想船舶の船速、船体抵抗を予測する。この計算を連続的に繰り返す事で船舶の航走状態を模擬したプロペラ負荷をエンジンベンチに与える事が可能になっている。
3.エンジン開発への適用事例
本項では今回構築した台上評価システムを用いた舶用エンジンの開発事例を紹介する。舶用エンジンにおいて加速性とスモークのバランスは商品性面で非常に重要である。しかし、市場において搭載される船艇の形状は様々であり、かつ、クラッチやプロペラの選定によっても上記性能が左右されるためエンジンの作動ラインを一義的に決定する事は難しい。一方、実船試験ではスモークを定量的・連続的に測定する事が困難である上、風向・風速・潮流などが時々刻々変化する環境下ではデータの再現性自体の確保が極めて困難である。これに対し今回構築した台上評価システムでは船艇の諸元を変更する事で様々な船艇・航走条件での評価が可能となる。また、台上評価であるため、過渡特性や排気性能も高精度に測定する事ができる。
本研究では対象エンジンとして6CX530(排気量7.4L、ボア×ストローク:110mm×130mm、390kW/2900min-1)を選定し、同エンジンを2機2軸で搭載している全長36フィートの試験艇(INIFINI36)をモデル船舶として仮想システムを構築した。ベンチ評価に先立ち同船を用いて定常航走状態での各種データを採取し、これを基に2.3項に示したSimulinkモデルを同定している。以下に台上評価システムを用いたエンジン制御開発事例を示す。
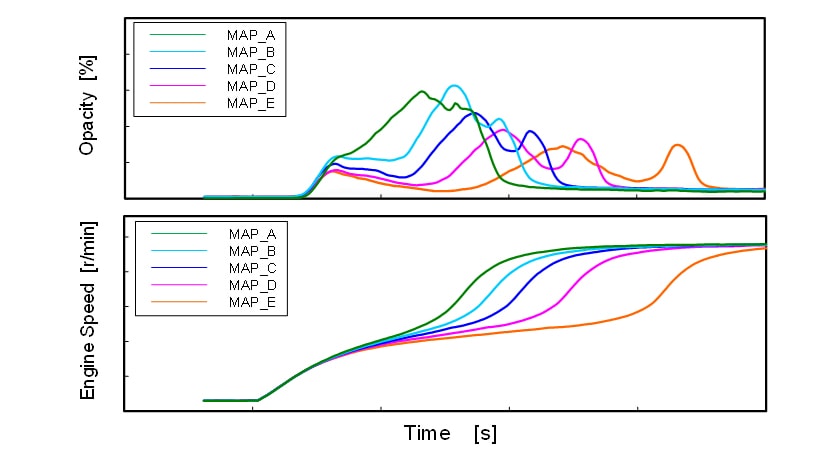
3.1. 過渡時過給圧補正適合
舶用エンジンでは加速時のスモーク発生を防止する目的で給気圧に対して最大噴射量制限をかける過給圧補正機能が設けられている。図5は台上評価システムを用いた過給圧補正マップ適合の事例である。図ではA、B、C、D、Eと5種類の過給圧補正マップを作成し、その特性を比較している。マップAが最も加速性を重視したマップで、加速に要する時間は最も短いがスモーク濃度(オパシティ)も高い。一方マップEはスモーク濃度低減を志向したマップであり、スモークはほぼ見えないレベルとなっているが加速に要する時間はマップAの倍程度かかるようになっている。このように台上評価システムによって各種仕様を考慮した数種類のマップを事前に適合し、実船ではその中で最も適したものを選ぶだけで最適な加速特性が得る事ができるようになった。
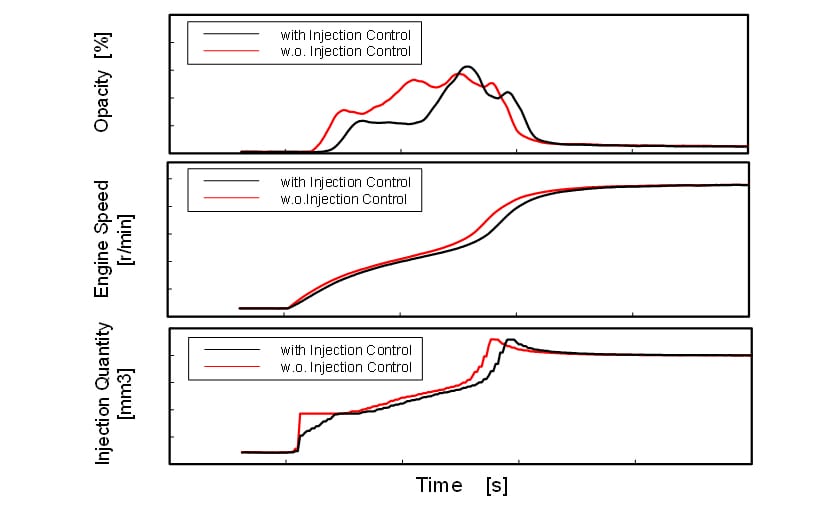
3.2. 加速初期の噴射量抑制制御の評価
船舶がスロー航走状態から一気にアクセル開度を全開にした際、加速の初期段階で一時的に高い濃度のスモークが排出される事がある。これはエンジンが低速で空気量が十分でなく、筒内の空気流動も活発でない状態で過剰な燃料が供給されたことに起因すると考えられる。この加速初期のスモークを抑制するため、アクセル開度と機関速度を基に加速判定を行い、エンジンが加速状態にあると判定された際に初期の噴射量を強制的に抑制する機能を考案した。
図6は加速初期噴射量抑制機能を台上評価システムで検証した例である。図中の赤線が初期噴射量抑制制御なし、黒線が初期噴射量抑制制御ありの場合である。図のように加速初期の噴射量を下げる事で船舶の加速特性を大きく損なうことなくスモークの排出を抑制できている事が分かる。
4.おわりに
本報では、エンジンテストベンチ上で実船舶相当のオペレーションを模擬できるシステム構築への取り組みとその効果について紹介した。今回構築した台上評価システムによってエンジン開発段階でより実使用環境に近い評価ができるようになったが、未だに十分な精度で模擬できているとは言い難い。例えば伴流係数wやスラスト減少係数t、船体抵抗Rは複雑なメカニズムに支配されており、現在のロジックではこれらを十分に表現できているとは言い難い。また、今回は直進航走のみを対象としていたが、クラッチ嵌脱入やクラッシュアスターン、マニューバリング等、船舶で評価するべき運転モードは他に多数ある。これら全てを台上で表現するためには船体やプロペラの挙動・特性に対するより深い理解とモデル化が必要であると考えている。
エンジン開発を取り巻く環境に目を転じると、欧州の自動車業界で導入が進められている新しい排気規制(RDE:Real Drive Emission)では排気や燃料消費率を実走行状態で評価する事を求められている。今後オフロードエンジンに対しても各種作業機・船舶に搭載された状態での燃費やエミッションへの関心が高まると考えられる。これらの要望に応えるため、エンジン単体の性能はもちろんの事、お客様の作業環境下でヤンマーエンジンが最適なパフォーマンスを発揮できるような技術構築に努めていく必要がある。これらを実現するカギとなるのが本報で紹介したモデルベース開発(MBD:Model Based Development)である。今後はMBD技術をさらに発展させ、「最大・最適なエネルギーを、最少の環境負荷で」達成するだけでなく、最上のY-Experienceをも提供できるような技術開発に取り組んでいきたい。
最後に、本研究を遂行するに当たりエンジン事業本部特機エンジン統括部の山田和寛氏、田中宏司氏の多大なご協力を頂いた事を記し、謝意を表します。
参考文献
- (1)Carton: Marine Propellers and Propulsion (2nd Edition), Butterworth-Heinemann, 2006, p.79-85
- (2)池田勝: 高速艇の設計と製図、海文堂、1978, p.66-136
- (3)MIT Open Cource Ware: MANEUVERING AND CONTROL OF MARINE VEHICLES http://ocw.mit.edu/courses/mechanical-engineering/
著者
