

リヤカバーの角度で深さを感知。耕うん始めでは深さの感知が遅れ、設定以上に深い耕うんとなる。

浅く耕うんする際は、作業機の下げ量を規制するので作業始めも深い耕うんにはならない。
ロアリンクでけん引負荷を感知。けん引負荷がわかりにくい長い作業機でも安定した深さで作業できます。(YT5114S)
※YT488S/498S/4104Sはトップリンクセンシング

作業機昇降スイッチを下げ方向に操作し続けると作業機はフローティング状態になり、スイッチから手を離すとドラフト制御に復帰。プラウ作業で、すき始めの枕地を少なくできます。


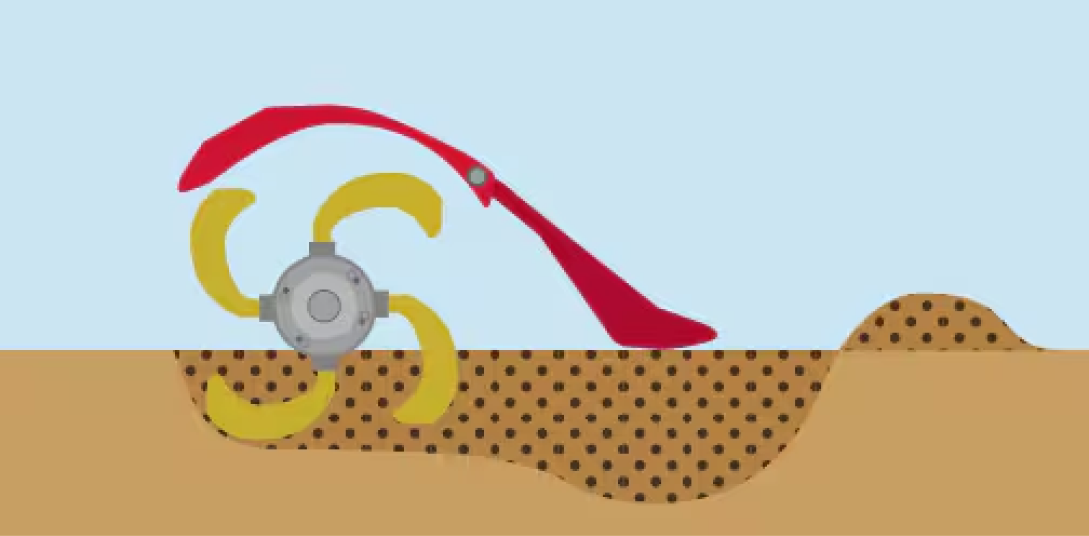
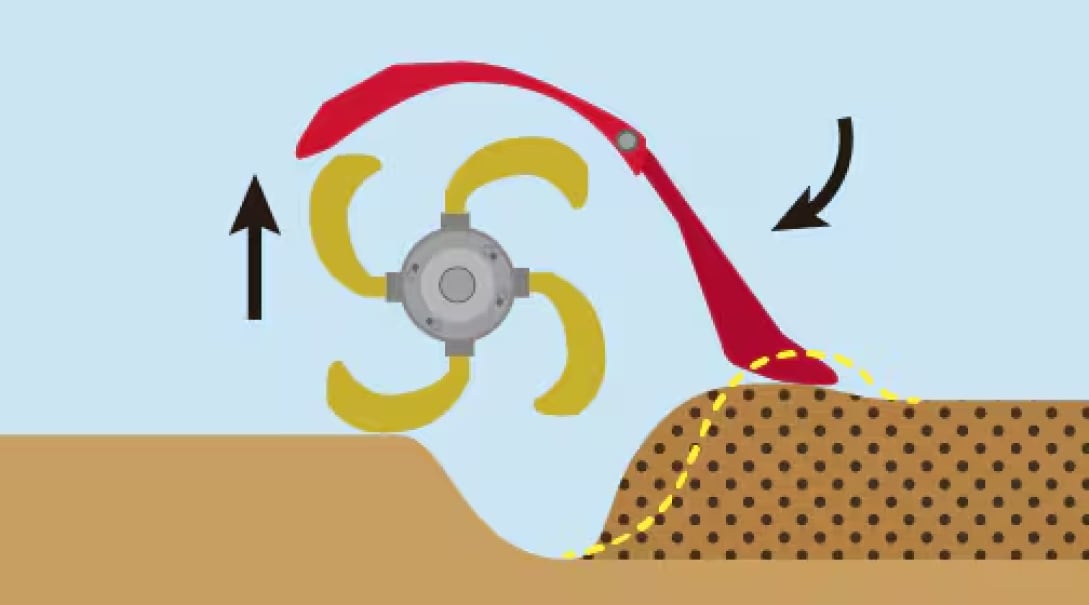
作業機昇降スイッチを上げると、PTOが先に止まってから遅れて作業機が上がる。そのため、耕うん終わりの土の盛り上がりを引いて、耕うん穴を埋めてから作業機が上がるので、枕地の仕上げがラクに。

負荷が大きい時、車速は一定のまま、エンジン回転が自動で上がり、作業効率を維持。プラウ、サブソイラなどのけん引作業に有効
負荷が小さい時、車速は一定のまま、エンジン回転が自動で下がり、燃料を節約。スタブルカルチ、レーザーレベラー、移動走行(トレーラー)などに有効
大きな負荷がかかると、エンジン回転は一定のまま、自動で減速。負荷が下がると元の車速に自動復帰。ロータリーなどのPTO作業に有効

タッチパネル式カラーモニターで、直進アシストをはじめ、さまざまな情報確認と設定・操作ができます。

エンジン回転速度/PTO回転速度/エンジン負荷率/水温/平均燃費/運転可能時間/尿素水消費率/車速/総走行距離/スリップ率※1/リフト位置/傾斜角度/バッテリー電圧など
トラクタ情報/UFO設定/直進アシスト※1/e-CONTROL/走行切替/上昇切替/パワートレッド※2/トラクタ設定/モニタ設定/GNSSステータス※1/カメラ(オプション)/エコトラリンク/起動ロックなど
※1 直進アシスト仕様のみ ※2 パワートレッド仕様のみ

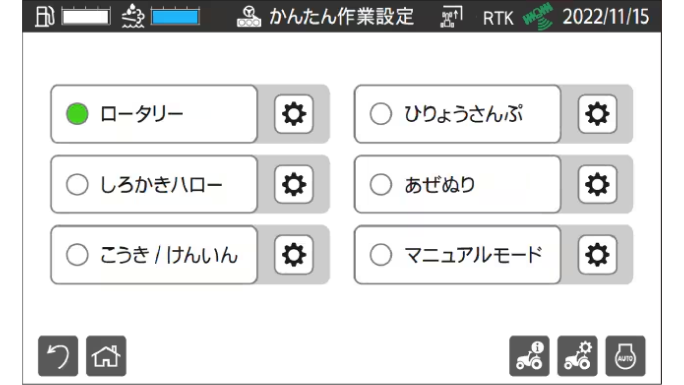
作業を選択し、走行自動スイッチ、UFO自動スイッチを押せば、すぐに作業ができる。設定内容のカスタマイズもできる。
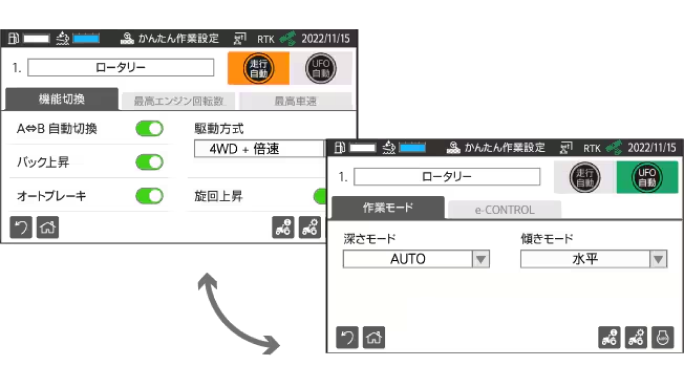
設定内容は走行↔︎UFO切替え表示で確認、変更ができる。

ヤンマーのテクノロジー。

仕事に打ち込める。
