
位置情報
RTK-GNSSによって、数cm単位の精度の位置情報を取得
移動局(トラクター)は、衛星(GNSS)から受信する位置情報と、固定基地局や電子基準点から受信する補正情報の2つの電波で高精度に位置を求めています。

- ※衛星電波の受信条件(天候や大気の電離圏の状態、周囲の地形・建物、衛星の数や配置、時間帯等)により自動操舵の精度が低下したり、自動操舵の機能が使用できない場合があります。
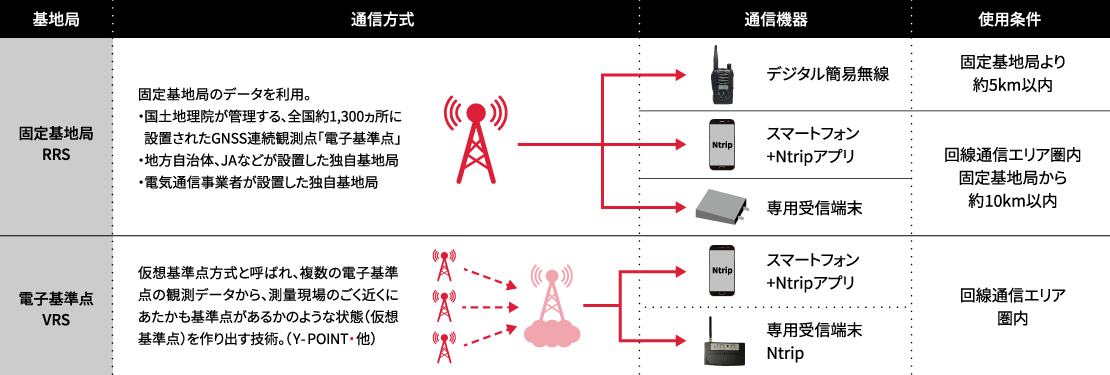
■補正情報の取得方法
固定基地局のデータを利用するRRS方式と、複数の電子基準点情報から移動局の近くに仮想基準点を作成し利用するVRS方式があります。
ヤンマーが提供する高品質のRTK位置補正情報サービスで、作業精度が大幅に向上。より安定・確実な作業を可能にします。
- ※補正情報サービスには、別途、通信機器代・通信費・利用料がかかります。
- ※RTK(Real Time Kinematic)は、リアルタイムキネマティック測量の略で、既知点からの補正観測情報をインターネット回線や無線を利用して、トラクター(移動局)に送信し、トラクターの位置をリアルタイムで測定する方法を言います。
- ※GNSS(Global Navigation Satellite System(s))は、GPSやGLONASSなどの測位システムの総称で、日本語では「全地球航法衛星システム」や「全球測位衛星システム」と呼ばれています。
- ※電子基準点とは、国土地理院が管理する全国1300か所に設置されたGNSS連続観測点。
- ※ほ場での測位誤差は、RTK-GNSS 2点間の相対位置 誤差/数cm
- ※GNSS受信機は、対応型式である必要があります。補正情報:RRS方式/VRS方式 補正情報のデータフォーマット:RTCM3.0/RTC3.1/RTCM3.2/CMR/CMR+
- ※Ntrip(Networked Transport of RTCM via Internet Protocol)は、GNSSの観測データや補正データの送受信をインターネット経由で行うための通信方式です。
もしものときも安心!
補正情報が一時的に途切れても、作業を中断せずに継続
万が一、自動走行中に補正情報が途切れ、RTK高精度測位状態を維持できない場合は、自動でD-GNSSに移行し、最大60秒間自動走行を継続。その間にRTK高精度測位に復帰すれば、そのまま自動走行を継続。復帰しない場合は、自動走行を一時停止します。
●位置情報
| RTK | 数cm |
|---|---|
| D-GNSS | 30cm程度 |

高精度作業を可能にするアンテナユニットと補正情報サービス
測位方式にRTK-GNSSを採用。数cm単位の高精度測位で、ズレを最小限に抑えます。専用基地局の設置が不要なRRS方式・VRS方式に対応しています。
- ※補正情報サービスには、別途、通信機器代・通信費・利用料がかかります。


- ※ご使用になる補正情報サービスに合わせて、いずれかひとつが必要になります。