ヤンマーブルーテック株式会社
開発部
ヤンマーテクニカルレビュー
船底洗浄システムの紹介
~海洋環境問題解決に向けた新規商品開発~
Abstract
The hull fouling of ocean-going ships is a global problem, both a biosecurity threat due to the unwanted transfer of organisms between ecosystems and a cause of higher GHG emissions due to increased drag.
These issues are generally addressed by dry docking every one to three years to wash off any biological fouling from the hull.
Recently, however, a growing number of countries have been mandating the hull cleaning of ships before they can enter port and this is driving demand for easy and frequent cleaning methods.
In response, Yanmar has developed an underwater hull cleaning ROV for large vessels that includes a mechanism for collecting the biofouling residue generated during cleaning.
The system can quickly wash adhering organisms off the hull while also filtering and collecting the removed material to prevent it from polluting the surrounding marine environment.
Yanmar believes that its technology for the underwater removal of biofouling will help to prevent environmental damage due to the unwanted transfer of organisms between marine ecosystems while also reducing GHG emissions.
1. はじめに
外航船の航行において、船底に海洋生物が付着することにより、付着生物の海域間移動による生態系かく乱や、推進抵抗の増大によるGHG(※1)排出量の増大が世界的に問題視され、船底洗浄を義務付ける法的整備が各国で進められています。一般的には、1~3年毎に乾ドックで船体洗浄するのに加え、ダイバーによる水中洗浄によって付着生物を除去し、これらの問題に対応しています。
海洋付着生物は、一度洗浄しても数週間のうちに再度付着し成長することから、頻繁に洗浄する必要があります。しかし、ダイバーによる水中洗浄には危険が伴い重労働であることから、より安全に、かつ頻繁に洗浄できる手段のニーズが高まっています。
このような社会的背景を受け、ヤンマーは船舶の船底を水中で洗浄する船底洗浄ROV(※2)と、洗浄時に発生するデブリ(※3)の回収技術の開発に取り組み、船底洗浄システムを開発しました。その中で、次のような技術的課題に取り組んで参りました。
① 洗浄対象船舶を素早く洗浄できる能力
② デブリを水中に拡散させない回収技術
本稿では、開発した船底洗浄システムの概要と、これらの技術的課題に対する取り組みについて紹介します。
- ※1GHG:Greenhouse gas(温室効果ガス)
- ※2ROV:Remotely Operated Vehicle(遠隔操作型無人潜水機)
- ※3デブリ:船底から除去した付着生物等のゴミ
2. 船底洗浄システムの紹介
2.1. 船底洗浄作業のイメージ
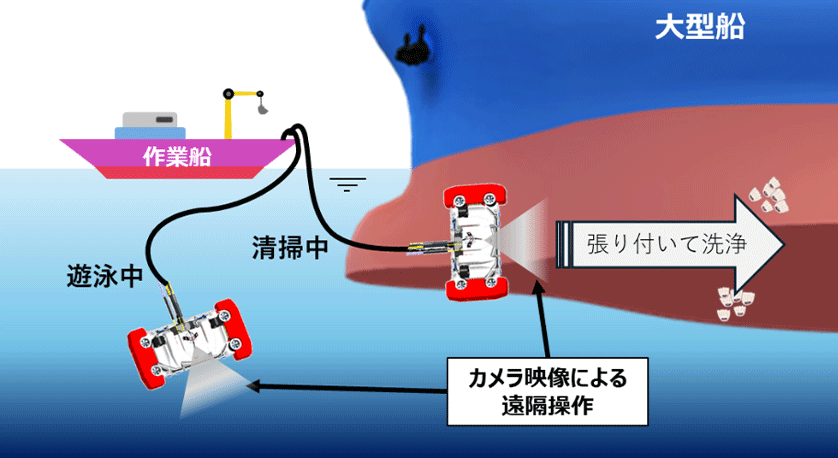
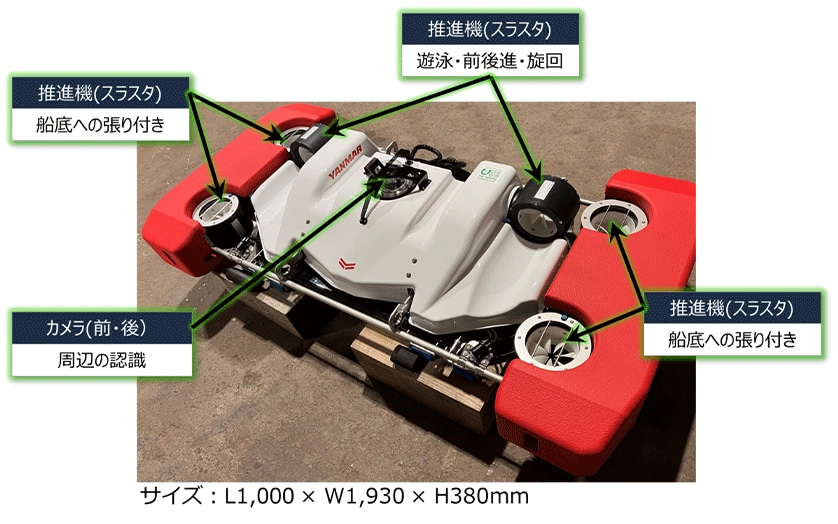
ヤンマーの船底洗浄ROV(型式:HC12、以下ROV)は、図1のように作業船上から遠隔操縦により動かし、船底に張り付いて洗浄を行います。本ROVは、推進機として6基のスラスタを利用(図2)しており、水中での遊泳と、船体の形状に沿って走行するという、二つの動作能力を備えています。船体の洗浄方式は高圧水の噴射による洗浄方式を採用しており、高圧水を噴射しながらROVを走行させることで、船体を効率的に洗浄します。操縦者は、ROVに取り付けたカメラの映像や各種センサ情報を確認しながら、無線コントローラにより作業船上から遠隔で操縦します。
2.2. 船底洗浄システムの全体像
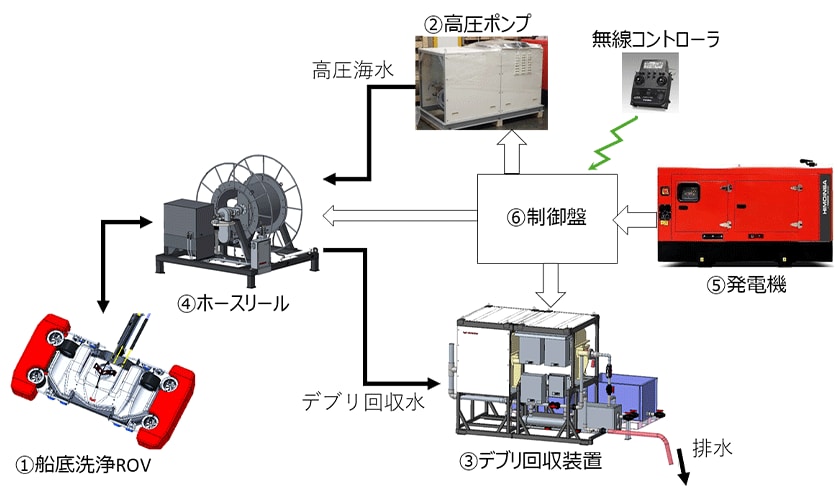
当社の船底洗浄システムは、図3のような構成となっています。本システムは、前述の①ROVのほか、②高圧ポンプ、③デブリ回収装置、④ホースリール、⑤発電機、⑥制御盤で構成されています。②~⑥の機器は、全て作業船の甲板上に設置され操作されます。
②高圧ポンプは①ROVの洗浄装置に対して、高圧の海水を供給するための装置です。す。また、水中洗浄中は、船体から除去された付着生物が周囲の海域へ拡散することを防ぐため、③デブリ回収装置により汚濁水を作業船上へ吸い上げ、ろ過して付着生物を回収します。ろ過回収後の処理水は殺菌処理され、作業周辺海域へ排水されます。高圧水とデブリ回収水は、大型船舶の洗浄を考慮し100mのホースを介して需給されており、このホースを巻き取る(または送り出す)装置が④ホースリールです。⑤発電機および⑥制御盤は、①~④の装置に対する電力の供給と①ROVの動作を制御するための装置です。
3. 技術的課題に対する取り組み
3.1. 洗浄対象船舶を素早く洗浄できる能力(水中移動速度の高速化)
大型船舶は洗浄要求面積が14,000m2以上になり、浄業業者はこれを1日で全て洗浄する必要があります。しかし、従来のROVは、単位時間当たりの最大洗浄面積(以下、仕事速度)が1,200~1,500m2/h程度であり、14,000m2を洗浄するには、10~12時間程度を要します。これでは1日以内に洗浄を完了させるのは難しく、従来のROVは仕事速度が不足していると言えます。そのため当社は、1日で洗浄を完了させるための指標として洗浄時間を7時間と設定し、最大仕事速度2,000m2/hを目標値として開発に取り組みました。
仕事速度の高速化を実現するためには、作業面積は確保しつつROVボディを可能な限り小型化し推進抵抗の少ないデザインを実現する必要がありました。
まずボディの小型化は、モータコントローラやデブリ吸引ポンプなどの機器を、ROV本体ではなく作業船上に配置し、ROVへの搭載機器を極力減らすことで1.5m3から0.7m3にまで小型化することができました。
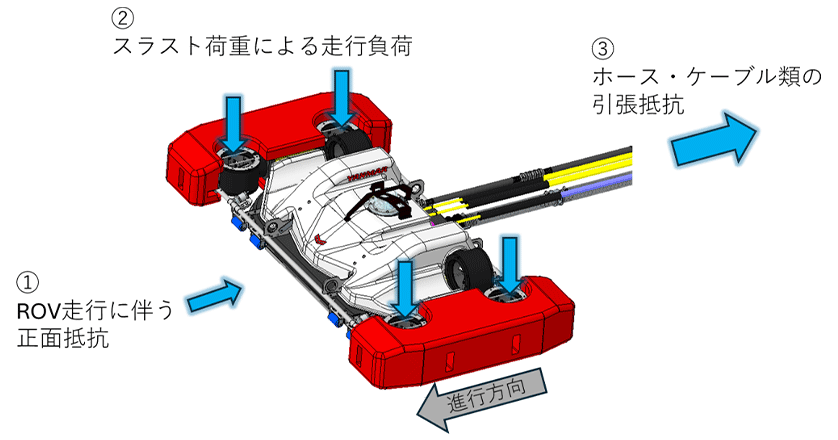
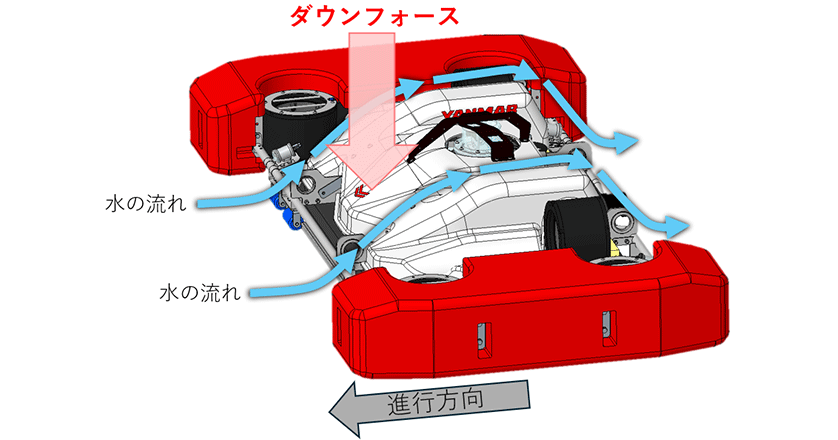
次に推進抵抗の少ないボディ設計に取り組みました。推進速度は、ROVが目標の速度で洗浄走行した際に受ける抵抗の総和に対し、それ以上の推進力を備えることで実現できます。抵抗は、図4に示す通り、①ROVが水中を走行することによって発生する正面からの抵抗と、②ROVが船体に張り付く際に発揮するスラスト荷重による走行負荷、そして③ホース・ケーブル類の引張抵抗があります。この中で、特に①正面からの抵抗の低減が水中作業機の動作性確保に影響度が高く、最重要課題として位置づけ、図5のように、薄型で流線形のデザインになるよう設計に取り組みました。さらに、ボディ形状を前かがみに設計することで、水中で前進した際に、その推進抵抗で自然にダウンフォースが得られ、船体に安定して張り付きやすい構造としました。
これらボディの小型化と推進抵抗の低減に取り組むことにより、目標推進速度で洗浄作業を実施した際の抵抗の総和は、従来機で660N程度だったのに対し、約360Nまで低減でき、これを満たす推進機(スラスタ)を装備することにより、2,000m2/hの仕事速度を実現しました。
3.2. デブリを水中に拡散しない回収技術(越境生物拡散による生態系かく乱防止)
船底洗浄によって発生したデブリが洗浄作業の実施海域に拡散すると、越境生物による生態系かく乱の恐れがあります。そのため、洗浄作業によってデブリを拡散させないよう、デブリを作業船上へ吸引し、ろ過して回収する機構が必要になります。
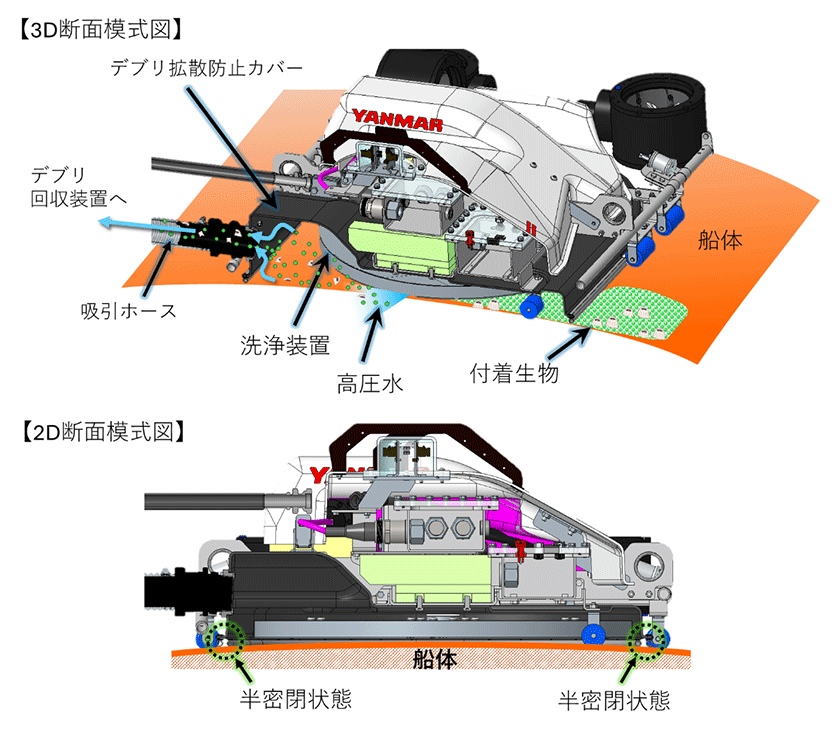
ヤンマーのROVは、水中で高圧水を船体に噴射することによって付着生物を洗い落とす装置であるため、この噴射によるデブリの拡散を防止しなければなりませんでした。そこで図6のように、洗浄装置を半密閉状態(船体張り付き時)にするためのデブリ拡散防止カバーを設け、その後端にデブリ回収装置へ繋がるホースを設置して吸引する構造としました。さらに、デブリ回収装置へのデブリ吸引流量が洗浄高圧水の噴射量を上回るように設計し、洗浄中に負圧状態とすることで、デブリがROVから漏洩することを抑制しました。
4. 船舶洗浄試験による性能確認
次に、ROVの仕事速度と洗浄効果の確認結果を紹介します。設計通りに性能が発揮されることを確認するため、ROV試作機を用いて実際に船舶を洗浄する評価試験により検証しました。(以下に述べる仕事速度と洗浄効果は、環境条件・付着生物の種類やサイズ・船体の形状等によって、発揮性能が大きく異なるため、製品の性能を保証するものではありません。)
4.1. 仕事速度の確認
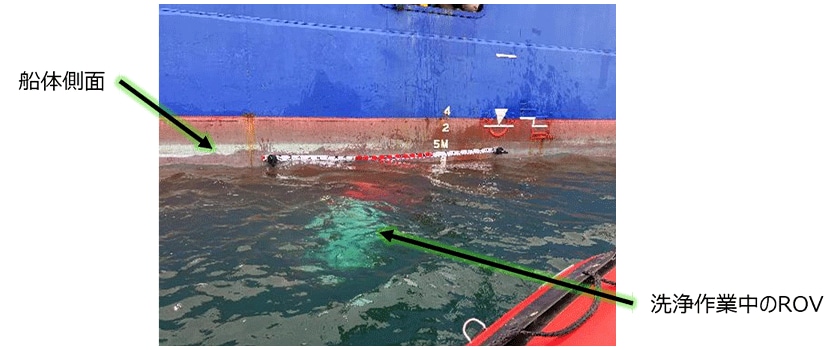
目標仕事速度である2,000m2/hは、ROVの洗浄幅1.2mを考慮すると、1分間あたりの速度は28m/min.となります。船舶の側面にROVを張り付かせ、最大出力で洗浄作業を行い(図7)、その際の推進速度を計測しました(映像を解析することによる推定)。その結果、平均推進速度は39.2m/min.となり、目標とした2,000m2/hを十分に満足する結果が得られました。
4.2. 洗浄効果の確認
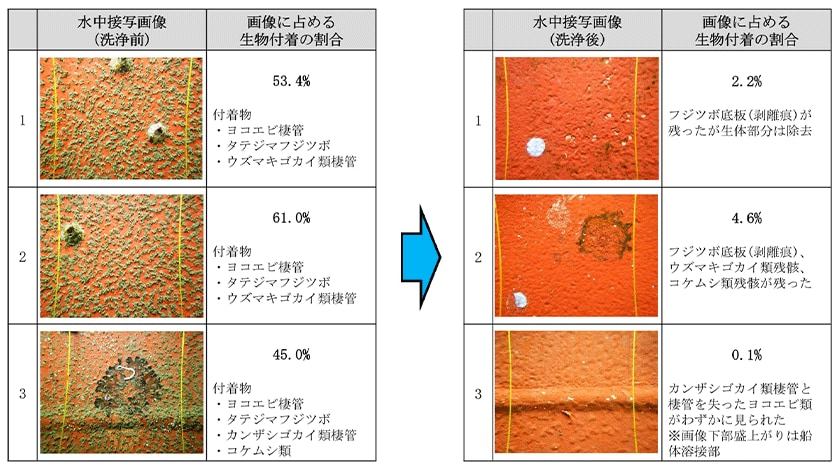
前項の洗浄試験において、洗浄前後の船底表面の生物付着状況は図8のとおりです。付着生物の除去性能を確認するため、図8の接写画像を解析し、付着生物の除去率を算出しました。洗浄前の生物付着面の割合は45.0~61.0%(平均53.1%)であったのに対し、洗浄後は0.1~4.6%(平均2.3%)まで減少し、付着生物除去率は95.7%と試算され、大きな洗浄効果が認められました。
また、本試験によりROVから吸引したデブリと、デブリ回収装置によりろ過した処理水は図9の通りです。海中での洗浄作業において、付着生物の回収率を確認することはできませんが、除去された船体付着生物を吸引し、正常にろ過できていることが確認されました。

5. おわりに
本稿では、ヤンマーの開発した船底洗浄システムと技術課題に対する取り組みを紹介しました。本取り組みによって、1項で挙げた船底洗浄における技術課題をクリアし、世界最速レベルの洗浄能力を持つ船底洗浄ROVを開発することができました。これにより、安全かつ頻繁に船舶を洗浄する手段を提供することができ、海域間移動による生態系かく乱の抑制やGHG排出量の低減に寄与し、持続可能な社会の実現に貢献することができると考えております。
しかし、現状のROVは、水中で自己位置をリアルタイムで俯瞰的に把握できる仕組みが備わっておらず、操縦者は水中カメラ映像に頼って自己位置を予想しながら手探りで操縦する必要があります。また、洗浄現場の水質によっては、汚濁環境での作業を強いられ作業効率が悪化することがあります。今後はより高い操縦性と洗浄効率の向上を目指し、水中自己位置認識技術と水中カメラ画像の鮮明化技術の開発に取り組む予定です。そのため、ヤンマーは水中センシング技術を保有するソニーグループ株式会社と合弁会社(ヤンマーブルーテック株式会社)を設立しました。特に、水中自己位置認識の技術は世界的に未確立であり、注目度の高い技術領域として知られ、今後様々な水中作業機への応用が期待されます。ヤンマーは、今後も水中作業機の事業領域において、お客様の課題解決に取り組んで参ります。

- ※本稿内容の技術開発は、(一社)日本舶用工業会の新製品開発助成事業として、(公財)日本財団より助成を頂いて実施しております
著者
