ヤンマーホールディングス株式会社 技術本部
中央研究所 基盤技術研究センター
ヤンマーテクニカルレビュー
ヤンマー製品における人間工学的評価の取り組み
~使いやすさ向上を目指して~
Abstract
This article describes Yanmar's work on the ergonomic evaluation of human-machine interfaces (HMIs) in its industrial vehicles and boats. To ensure consistent data acquisition, Yanmar developed an operating simulator that reproduces dynamic work environments, enabling this work to deal with challenges such as environmental fluctuations and seasonal constraints. The simulator is the world's first multi-vehicle and boat operating simulator equipped with advanced features including physical simulation, omnidirectional visibility, and multi-scenario HMI adaptability. Case studies presented in the article describe the optimization of lever layout to reduce physical loads and an evaluation method for developing intuitive HMIs. The former utilized the maximum voluntary contraction (MVC) ratio, a value calculated from electromyography (EMG), and HMI development used eye-fixation-related potential (EFRP), a value derived from electroencephalograms (EEG). Yanmar uses these technologies in its development of user-friendly products.
1. はじめに
当社では、年齢、性別、体格や経験に依らず誰もが安全に使いやすい機械の提供を目指している。人間が機械を取り扱う際、機械への要求あるいは機械からの情報の伝達は、ヒューマンマシンインターフェース(HMI)を介して行われる。したがって、安全で使いやすい機械を提供するためには、人間と機械の境界であるHMIの最適化が不可欠である。
これまで産業用の機械は、生業の道具であることから、HMIと比較して、機械の機能や性能が優先的に検討されてきた。そのためHMIは、官能評価や過去機種に基づく検討に留まりがちであった。しかしながら現在では、使いやすさが機能や性能を100%引き出すだけでなく、製品の差別化の要素として重要となってきた。このため当社ではHMI最適化を単なる官能評価や過去機種からの情報だけでなく、人間特性を考慮するため客観的な指標による定量評価も合わせて用いることで、人間に最適化した安全で使いやすいHMIの提供を推進している。
例えば農業用や建設用車両など産業用車両のHMIでは、自動車業界と大きく異なり、ハンドル・ペダルによる走行操作に加え、レバーやスイッチで作業機を制御し、メータやディスプレイには走行・作業の双方に関わる多様な情報を表示する必要がある。すなわち、操作具・表示情報の両面で対象が多岐にわたり、また、近年の高機能化に伴う要素の増加も相まってHMIは複雑化している。このような複雑なHMIおいては、各操作具の形状や大きさが、手の大きさや握り形状に合っているか、また、配置が身体の可動範囲に収まっているかなど操作性についての検討を行うだけでなく、複雑な構成でも迷わず操作できる配置構成か、操作方法がすぐに分かるかなど直感性についても検討する必要がある。
本稿では、このような人間特性を考慮したHMIの検討の取り組みとして、HMIの評価環境構築と評価事例を紹介する。
2. 評価環境の構築:多用途運転シミュレータの開発
HMIの評価においては、実際の作業環境のようにダイナミックな環境下で、年齢・性別・体格・熟練度など多様な対象者のデータを体系的に測定し、統計的な観点から分析する必要がある。このとき、測定条件ごとに統制した環境下でデータを取得し、分析することが望ましい。統制されていない環境下で取得したデータでは、統計分析時の標準誤差が大きくなるため、信頼性の高い分析結果を得るには、大量のデータが必要となる。統制した環境下で取得したデータの場合、少数のデータで信頼性の高い分析結果を得ることができるため、工数や評価期間を大幅に削減できる。
ダイナミックな環境下で車両のHMIの評価する場合、一般的には運転シミュレータを用いる。運転シミュレータは、実際の運転環境を模擬的に再現するシステムであり、自動車開発などでも広く活用されている(1)。
産業用車両では、走行操作に加え作業操作も行うため、産業用車両用の運転シミュレータでは、作業時の操作、車両挙動、作業対象の土壌などの挙動の再現する必要がある。
当社では、これらを再現できる運転シミュレータを開発した(図1)。 開発した運転シミュレータの機能と、従来の自動車用運転シミュレータの機能の比較表を表1に示す。
開発した運転シミュレータでは主に以下の機能を実装することで産業用車両や船舶特有の環境の再現を可能としている。
- 物理エンジン:耕耘や掘削などで生じる土の挙動や波による水面変位のなど複雑な物理現象を再現
- 視界:作業中に必要となる全周囲の視界を再現
- 多様なシーンHMIへ対応:圃場、土木・建設現場や海上などのシーンや、各車両や船舶のHMIを再現
以上のように、走行シーンに加え、作業シーンの再現を実現した運転シミュレータを開発し、莫大な工数や評価期間を要さず、また、データのばらつき(ノイズ)を排除した環境で微小な変化を捉えることが可能となり、産業用車両や船舶のHMIの人間工学的な評価が進められるようになった。このような多車両、船舶に対応した運転シミュレータは世界初の技術である。
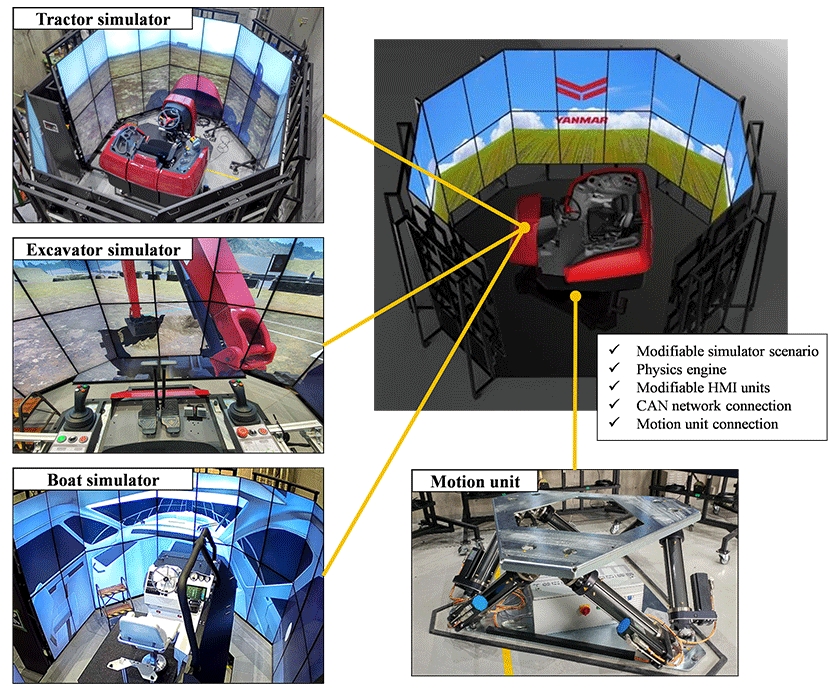
表1. 運転シミュレータ機能比較
| 機能 | 産業用車両/船舶 | 自動車 | |
|---|---|---|---|
| 車両モデル | 走行モデル | ○ | ○ |
| 作業モデル | ○ | - | |
| 物理エンジン | 走行抵抗 | ○ | ○ |
| 土壌挙動 | ○ | - | |
| 流体挙動 | ○ | - | |
| 視界 | 全周囲 | 主に前方 | |
| シーン | 道路 | ○ | ○ |
| 不整地 | ○ | - | |
| 海上 | ○ | - | |
| 天候 | ○ | ○ | |
| ハードウェア | HMI要素変更 | ○ | ○ |
| コックピット変更 | ○ | - | |
3. 人間工学的評価の取り組み事例
本章ではHMIを検討する際に行った人間工学的評価の事例を紹介する。事例の一つとしては、操作性に影響する身体的な負担を定量的に評価しHMIの設計ガイドラインを策定した。二つ目の事例として、運転シミュレータを用いたダイナミックな環境下で、直感性を定量化しHMIを比較評価した。
3.1. 筋電図を用いた操作性の評価とHMI配置ガイドラインの策定
レバーの配置は作業者の身体的負担に大きな影響を与える要素である。レバーの配置や高さや角度が適切でない場合、操作性が低下し、それに伴い腕や肩に過度な負担がかかり、疲労を引き起こす。
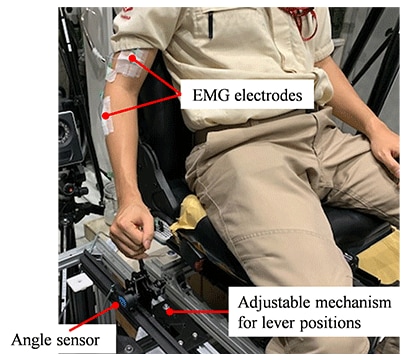
レバーの操作性は、筋電図(EMG)を用いることで評価することができる。評価指標には、筋電図から算出する最大随意収縮比(MVC比)を用いた。MVC比は、筋肉の最大収縮時の電位を基準として基準値に対する割合に変換した値である。この値が大きいほど、筋肉に大きな負荷がかかった状態である。
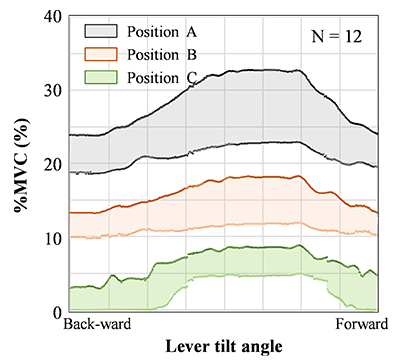
レバーの配置を体系的に複数ヶ所設定し、体格の異なる12名の実験参加者を対象として各位置におけるMVC比を測定した(図2)。結果の一例として、3か所の異なる配置でレバーを操作した際のMVC比の変化の推移を図3に示す。
自然な腕の動きに適合した配置(図3 Position C)の場合、レバー操作中のMVC比が小さい、すなわち筋負担が小さいことが分かる。計測データを基に、配置箇所ごとのレバー操作中のMVC比の積分値をマップ化し、最適なレイアウトを設計するためのガイドラインを策定した。
3.2. 脳波(眼球停留関連電位)による直感性の定量化手法の開発
産業用車両の複雑なHMIにおいては、身体的負担の軽減だけでなく、操作時に迷わない直感的な配置に設計することも重要である。HMIの配置や操作方法が直感的でない場合、操作時に瞬時に考える必要が生じ、操作時の情報処理に負荷が大きくなる。
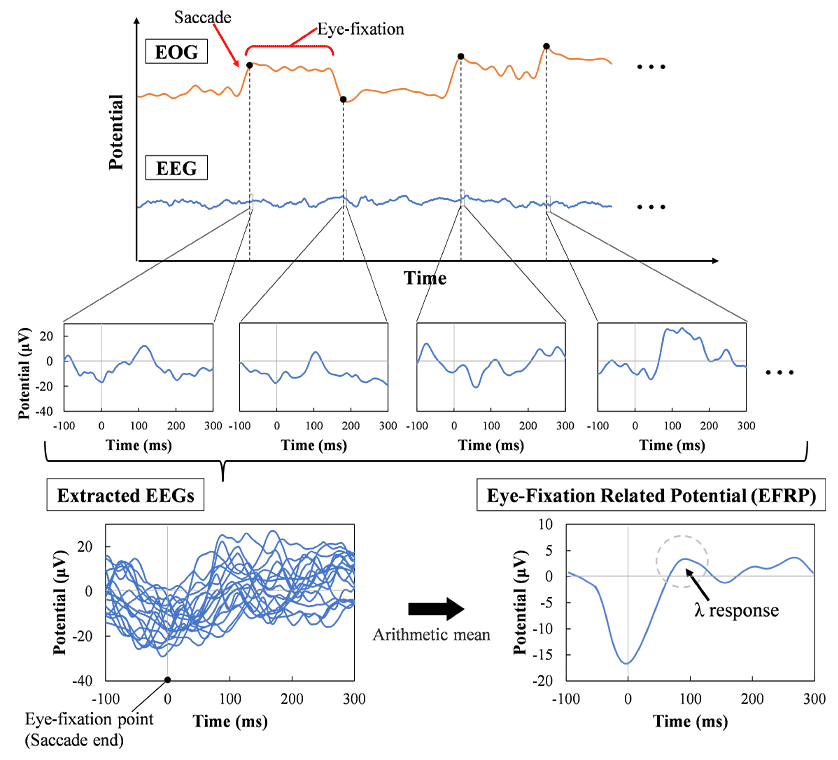
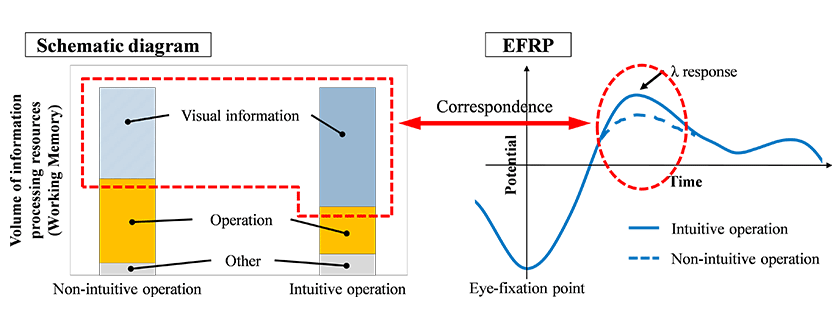
直感性の評価手法としては、脳波の一過性の成分である眼球停留関連電位(EFRP)を用いた検討を行った。EFRPは、視線が特定の視対象に停留した際(眼球停留時)に発生し、視覚的な情報処理を反映することが知られている(2)。EFRPは、眼球運動(眼電図:EOGなど)と脳波(EEG)を同時に計測することで観測することができる。脳波の一過性の電位変化は非常に微弱で、基本律動(アルファ波など)や他の電気的なノイズに埋もれ、単一波形での観測が難しい。一過性成分の発生条件下で複数回計測した波形に対して、発生トリガー時点を時間軸の基準として加算平均することで、基本律動やノイズなどを平滑化し、EFRPを観測できる。図4にEFRPの算出方法を示す。EFRPのトリガーは、眼球停留点(サッケード眼球運動終了時点)であり、この時点を時間軸の基準として脳波を切り出し、位相を合わせて加算平均する。EFRPの波形には、ラムダ反応と呼ばれる特徴的な陽性ピーク電位が存在し、この電位の大きさを比較することで視覚情報に関する情報処理量(ワーキングメモリ)を定量化できる。
運転中は、視覚情報の処理だけでなく、空間的な作業(操作)に関連する情報処理など様々な情報処理が同時に行われる。情報処理量とEFRPの関係性の模式図を図5に示す。HMIの配置が直感的な場合、操作に関連する情報処理量が減少し、視覚情報処理に対してより多くのリソースを配分できるため、ラムダ反応のピーク電位が大きくなる(3)。したがって、ラムダ反応の電位を測定することで、間接的に操作に関連する情報処理量(直感的なHMIであったかどうか)を評価することができる。
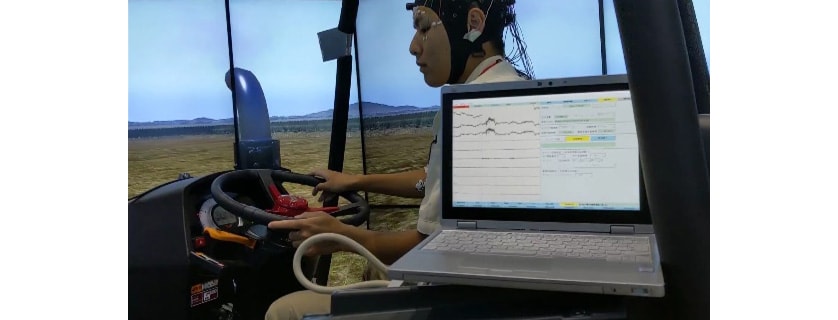
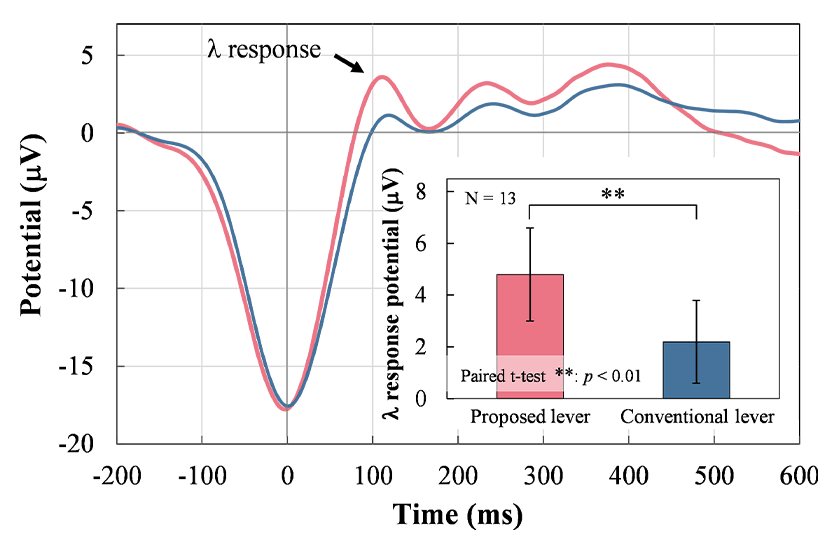
当社では、この直感性の定量評価手法の妥当性を検証(4)(5)し、トラクタのHMIの評価を行った。評価したHMIは、主変速レバーに前後進切り替え、副変速切り替え機能を追加した統合レバーと、従来の主変速レバーであった。統合レバーでは、走行に関する全ての操作を1つレバーに集約しているため、直感的に操作できる。2つのレバーを比較評価するために、13名の実験参加者を対象に運転シミュレータでのダイナミックな環境下で直感性の評価を行った(図6)。図7にそれぞれのレバーを用いて作業した際に計測したEFRPの波形とラムダ反応の電位を示す。統合レバーでは、ラムダ反応の電位の大きさが従来のレバーと比較して有意に大きい。すなわち、統合レバーでは操作時の情報処理量が低減され、視覚情報に対してより多くの情報処理のリソースが配分されたことが示唆された。
4. おわりに
本稿では、産業用車両HMIにおける人間工学的評価の以下の取り組みについて紹介した。
- 統制した環境下で人間工学的な評価行うために、各製品の使用状況に対応する環境を再現できる多用途運転シミュレータの開発を行った。
- 操作性や直感性を筋電図や脳波など生体信号から算出される客観的な指標で定量化し、HMI配置ガイドラインの策定や新たなHMIの評価を行った。
HMIはお客様の安全や使いやすさに寄与する重要な要素である。今回紹介した技術を基に商品開発に取り組み、お客様にとって、より良い製品を提供していけるよう努める。
参考文献
- (1)須田義大, 高橋良至, 大貫正明, “研究用ユニバーサル・ドライビングシミュレータ”, 自動車技術, 59巻, No.7, pp.83-85(2005).
- (2)A. Yagi, “Saccade size and lambda complex in man”, Physiological Psychology, Vol.7, pp.370-376(1979).
- (3)Y. Takeda, N. Yoshitsugu, K. Itoh and N. Kanamori, “Assessment of Attentional Workload while Driving by Eye-fixation-related Potentials”, Kansei Engineering International Journal, Vol.11, No.3, pp.121-126,(2012).
- (4)N. Yoshioka, T. Kimura, Y. Shu, T. Okamatsu, N. Araki and M. Ohsuga, “Evaluation of the Tiller Switch Layout of a Tractor Using Eye-Fixation Related Potentials,” The 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society(EMBC 2020), Montreal, QC, Canada, 20-24 Aug. 2020.
- (5)吉岡直人, 岡松太郎, 舒瑜倬, 荒木信之, 鎌倉快之, 大須賀美恵子, “ショベルカーHMIにおける操作方法の違いが作業性へ与える影響の評価”, 人間工学, 61巻, Supplement号, pp.3D05-02(2025).
著者
