ヤンマーホールディングス株式会社 技術本部
イノベーションセンター 先行開発部
ヤンマーテクニカルレビュー
魚体追跡と計数エリアを用いた魚数カウントシステムの開発
~養殖現場の負担軽減を目指して~
Abstract
Fish counting at aquaculture facilities has traditionally been done by manual counting using video of fish passing through a fishway. However, this process imposes a significant workload on operators, as hundreds or thousands of fish must be manually counted in each video. To address this issue, Yanmar has devised an automated and accurate fish counting system that analyzes video from fishway cameras. When used on videos from eight different aquaculture sites, the system achieved a count accuracy of 99.18%*1. These results demonstrate that this approach substantially reduces the fish counting workload in aquaculture management.
1. はじめに
近年、世界的に海産物の消費が増大しており、資源枯渇により制約が大きい海面漁業に対して、養殖事業は大きく伸びています。2013年には海面漁業の漁獲高を上回り、今後もますます拡大していくものと考えられます(1)。
一方で、養殖場所の確保や人件費、飼料の高騰から、より高効率な生産管理が求められています。特に生簀内の尾数管理は、給餌量の最適化や出荷計画の策定において重要な役割を果たすため、様々な方法が試されてきました。尾数管理のために魚を釣り上げて計数する方法では、魚へのストレスや作業コストの観点から日常業務では困難です。また、生簀の重量から尾数を推定する方法もありますが、吊り上げが不可能な重量の生簀やマグロのような回遊魚には適用できません。
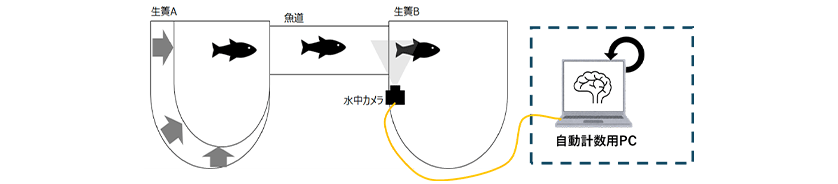
そのため、実際の養殖現場では、2つの生簀の間に魚道と呼ばれる網状の通路を設置し、その通過映像を記録して人が目視で尾数を計数する方法(Fig.1)が用いられています。目視計数は、数百~数千尾もの魚が魚道を通過する様子を継続して観察する必要があるため、作業者への負担が極めて大きくなります。計数時には、記録した動画の再生速度を落とすほか、コマ送りで確認するなどの工夫がされていますが、録画時間よりも多くの作業時間が必要となります。
そこで、Fig.2に示す通り、魚道を通過する魚の動きをカメラで撮影し、人に代わって尾数を自動的かつリアルタイムに計数できる魚数カウントシステムを開発しました。

2. システム概要
本システムは、生簀から生簀への移し替え時、もしくは活魚運搬船から生簀への流し込み時などの使用を想定しています。その際に、魚を検出および追跡して自動的にリアルタイム計数処理を行います。ハードウェア構成は、撮影用の水中カメラと水中カメラの設定を行うコントローラ、および処理用のコンピュータです。カメラにはパンチルト機能があり、カメラ設置後に海上から細かい画角の調整が可能です。自動計数を行うには、まず魚が通過する魚道の出口付近に、水中カメラを固定します。次に、水中カメラの画角や明るさなどをコントローラで調整します。最後に、魚道からの流し込みを開始し、出口から出てきた魚影を計数ソフトウェアで検出および追跡して計数を行います。
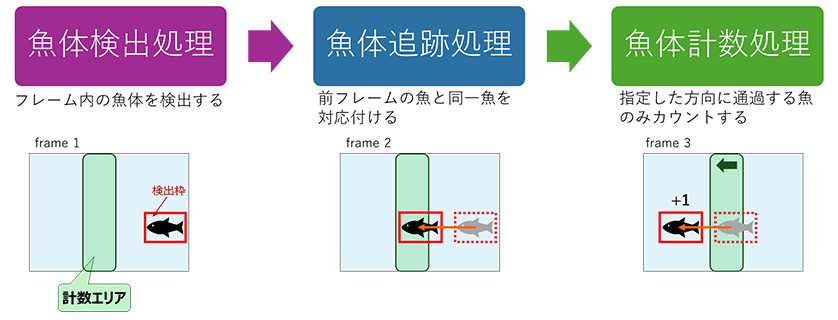
計数処理は、Fig.3に示すように魚体検出処理、魚体追跡処理、魚体計数処理の3つで構成されています。まず、魚体検出処理では、物体検出AIを使用して動画内の各フレームの魚体を検出します。次に、魚体追跡処理では魚の移動量を基に次のフレームでの同一個体を対応付けます。最後に、魚体計数処理では予め動画内に設定した計数エリアを指定した方向に通過した魚体のみを計数します。
製品仕様は2種類あり、高速版(H仕様)は録画と同時に計数処理を行うため、録画中または録画後すぐに計数結果が確認できます。標準版(S仕様)は録画後に計数処理が実行されるため、計数結果の確認までに処理時間がかかります。今回、リアルタイム計数と記載しているのは、高速版(H仕様)の結果です。
2.1. システムの適用環境
自動計数の精度を高めるためには、使用環境を計数しやすい環境にすることも重要です。
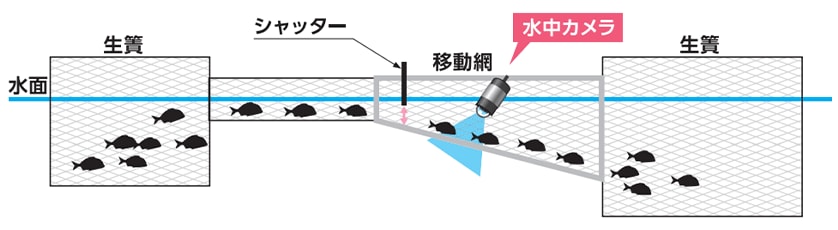
マダイの場合は、Fig.4のような魚道を用いて計数を行っています。計数時に大量のマダイが魚道に入らないようにシャッターによってマダイの数を調整します。さらに、マダイが深いところを目指す習性を活かして魚道に傾斜を付けることで、魚道内で留まるマダイや逆走するマダイを低減しています。
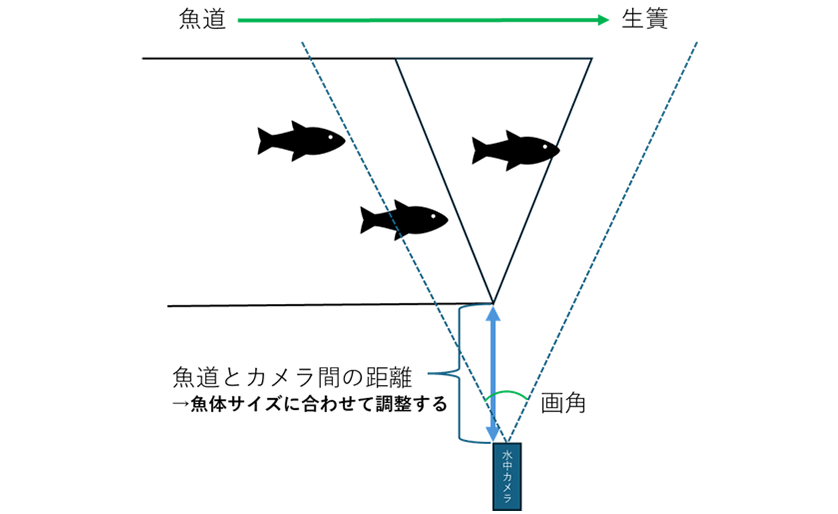
マグロの場合は、幼魚のサイズが0.3mから0.5m程度で成魚に近づくと1m以上にまで成長します。 成長段階によって魚体サイズが大きく変化するため、幼魚と同じ撮影条件では成魚は画角内で過大に映り込み、計数に支障をきたす可能性があります。そこで、魚体が大きいほどFig.5に示すカメラと魚道との距離を確保する必要があります。
そのため、魚体サイズとカメラの設置水深の関係に基づき、カメラ設置水深の指標を策定しました。この指標を用いることで、画像内に写る魚体サイズをほぼ一定に保ち、検出アルゴリズムが安定して作動する条件が維持されるため、計数精度が安定します。
2.2. 適用技術:高精度計数を実現する技術
本節では、高精度に計数するための技術について紹介します。 精度低下の原因としては、環境外乱の影響と計数後の魚の行動に大別されます。これらに対する対策を講じた結果、計数精度99.18%※1での計数を実現することができました。
A)環境外乱
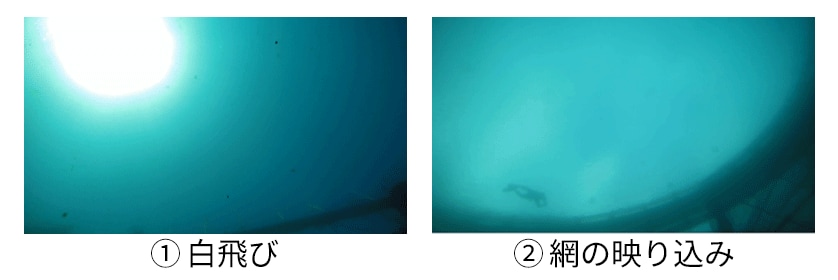
環境外乱とは、Fig.6に示すように直射日光により画像の一部が白飛びする(Fig.6 -①)、画像の一部に網が写り込む(Fig.6 -②)ことです。これらの環境外乱の影響がある部分では、魚が検出・追跡できなくなり、誤カウントや未カウントなどが起こるため、計数精度が低下します。
そこで、環境外乱への対策として、環境外乱のない領域に計数エリアを設定し、計数エリア内で計数処理を行うようにしました。これにより、画像端に白飛びや網の映り込みなどが発生しても、その影響を除外して計数処理が可能になりました。
- ※1独自に取得した試験動画30種に対する精度、目視計数との比較により精度算出
B)計数後の魚の行動
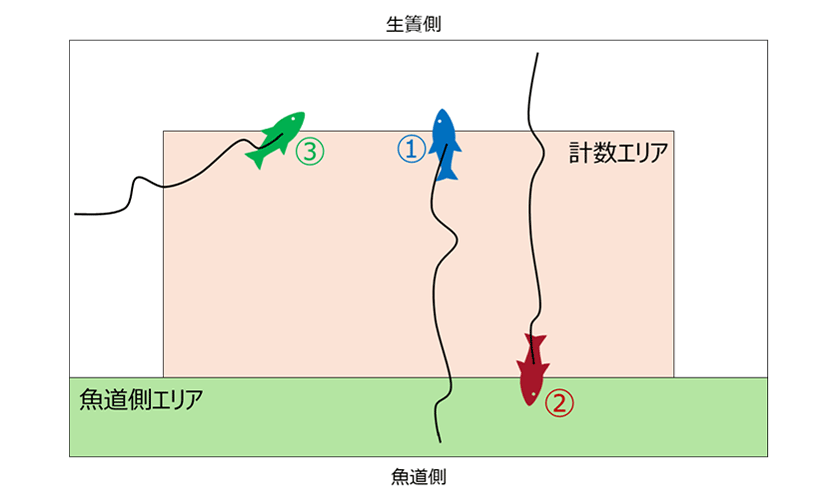
計数後の魚の行動については、Fig.7-②のように計数後の生簀内から魚道に逆走する魚(逆走魚)とFig.7-③のように計数後の生簀内を周回して再び画角内に現れる魚(周回魚)により計数誤差が生じます。
逆走魚は、生簀内へ戻った際に再度計数される可能性があり、そのままでは同一個体を二重に計数してしまうため、誤カウントの要因となります。したがって、逆走魚は魚道に戻った段階で計数値も戻す必要があります。周遊魚は再び計数エリア内に入り、生簀側に通過すると再度計数される可能性があり、誤カウントの原因になります。
そこで、計数エリアと魚道側エリアの境界を計数の判定処理に利用しました。Fig.7-①のように魚道側エリアに入り、生簀側に計数エリアを通過した魚のみ加算し、Fig.7-②のように計数エリアに入り、魚道側エリアに通過する逆走魚は減算しました。さらに、 Fig.7-③のように魚道側エリアを通らずに計数エリアに入り、再び生簀側に出ていく魚は既にカウントした後の周遊魚や誤検出された海藻である可能性が高いので加算および減算の処理は適用しません。このように、魚道側エリアと計数エリアへの魚の出入りを把握することで、逆走魚や周回魚の影響を低減した計数処理が可能になりました。
3. 計数結果の確認画面
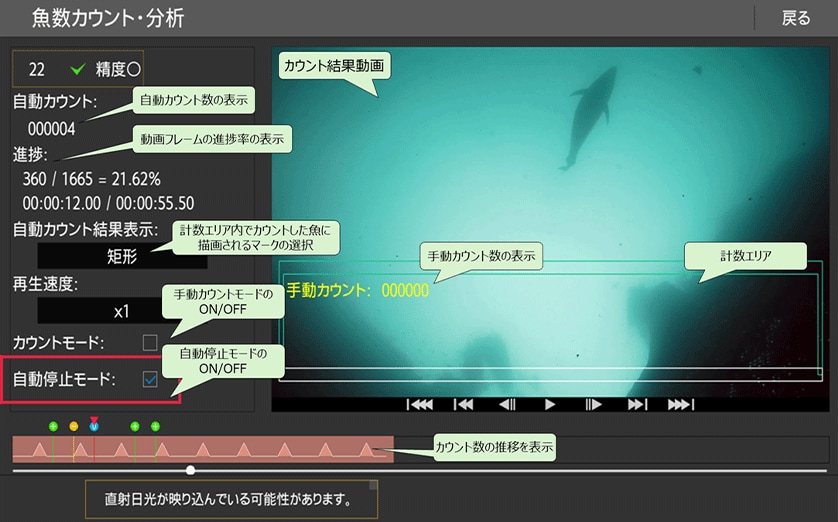
魚数カウントシステムでは、自動計数後に Fig.8の確認画面で計数結果の動画を閲覧できます。確認作業の効率化のため、動画の再生速度を変更できるほか、「自動停止」機能を搭載しています。この機能を有効にすると、魚が検出されたフレームで自動的に停止し、それ以外は高速再生されるため、見逃しを減らしつつ確認時間を短縮できます。
さらに、画面下部には計数結果の時系列頻度分布を表示しており、関心のある区間を選択すると該当フレームへ移動して再生できます。これにより、魚が検出された部分のみ効率的に確認することが可能です。
また、手動計数でも確認したいという要望があり、マウスクリックによる手動計数機能を付けています。
4. おわりに
本稿では、魚体追跡と計数領域を用いた魚数カウントシステムの紹介をしました。
本システムの自動計数アルゴリズムは、魚道や通路などを通り、魚が一定の方向に動くシチュエーションで使用可能です。対応済みのマグロと真鯛以外の魚種への適応を進めるほか、水中に限らず、様々なシーンでの活用へ適用範囲の拡大を検討していきます。
参考文献
- (1)“令和4年度 水産白書”, 水産庁, https://www.jfa.maff.go.jp/j/kikaku/wpaper/R4/230602.html,(参照2025-10-28).
著者
