ヤンマーアグリ株式会社
開発統括部 作業機開発部
ヤンマーテクニカルレビュー
ラジコン草刈り機「YW500RC」の紹介
~コンパクトで急斜面安定性に優れたハイブリッド式ラジコン草刈り機の開発~
Abstract
In agricultural work, mowing the banks of fields requires a lot of labor, and with the aging of agricultural workers, the demand for labor-saving bank management is increasing year by year.
We closely observed the actual work of our customers in mountainous areas and developed a radio-controlled grass mower for steep slopes that reduces the labor required for mowing.
In addition to being compact yet having excellent stability on steep slopes, the adoption of Yanmar's patented control technology allows it to cut grass at the same height as a large machine, and the adoption of a series hybrid system allows it to be transported into and out of the barn in electric mode, and it also meets customers' requests for low noise.
In this article, we will introduce these technologies that are installed in the radio-controlled grass mower “YW500RC” released in 2023.
1. はじめに
ほぼ完成された稲作機械一貫体系の中で、稲作農家に残された重労働の一つに畔の草刈り作業が挙げられます。農業従事者の高齢化などに伴い、畔管理の省力化に対する要望は年々高まっております。特に斜面での草刈り作業は、労力に加え転倒や刈払い機への巻き込まれによる事故など、人による作業では危険が伴います。
当社では中山間地域のお客様の実際の作業を調査・観察し、QFD(品質機能展開)手法を用いて草刈り作業を省力化する斜面用のラジコン草刈り機を開発しました。中山間地域にありがちな急斜面や幅の狭い作業通路、部分的な高い草の草刈りを、コンパクトながら優れた急斜面安定性に加え、ヤンマー独自の快速制御により大型機並みの草丈の刈取り性能を実現しました。
また車両走行は電気モータ駆動とし、大きな動力を必要とする刈取り部はエンジン駆動としたシリーズハイブリッド方式を採用しましたので、エンジンを使用せずに静かな納屋搬入出が実現できました。
2. 商品の概要
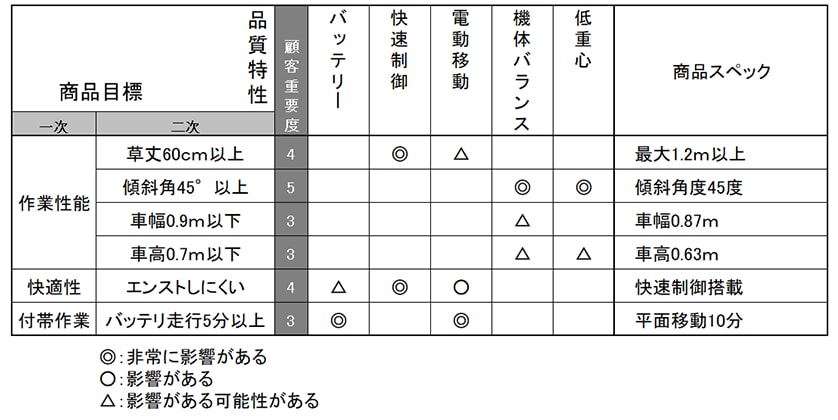
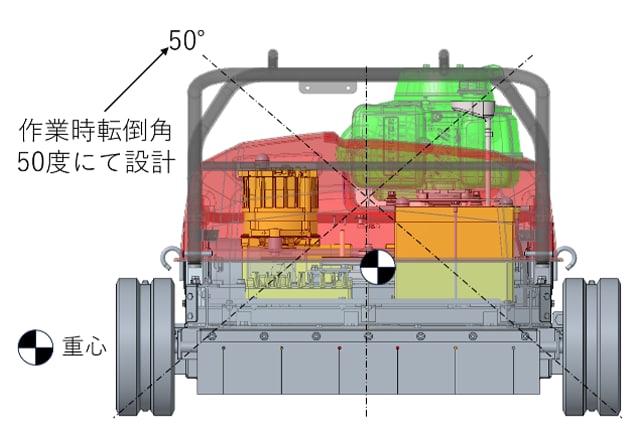
YW500RC(図1)は圃場整備された畦や法面、法面に設けられたステップ付近の雑草を効率よく安全に刈ることのできるラジコン式の斜面草刈り機であり、45°の斜面(図2)の走行を可能にしています。操作はラジコン式を採用し、オペレータが送信機を使用し、等高線に沿って草刈り作業をします。オペレータは斜面に足を運ぶことがないため、斜面作業中の転倒や回転刃への巻き込まれなどよるけがを無くすことができます。QFD(Quality Function Deployment. 顧客が製品に求めるニーズを正しく反映させるための設計アプローチ手法)を元に必要な品質特性を特定した結果(表1)、中山間地域では斜面での走破性が高く、コンパクトで高い草も刈ることができる機体が望まれています。全幅は870mmとコンパクトなため狭い作業通路、高さが630mmと低いため果樹園などの作業も可能です。また「快速制御」の採用により、他社の小型機では刈り取れない高い草丈まで刈ることが可能です。他社の同クラスのラジコン式草刈り機と比較して優れた電動走行時間を有し、納屋や倉庫などへの保管時の移動もエンジンを駆動せず走行が可能です。


表1 QFD(品質機能展開)抜粋
3. 適用技術と商品特徴
3.1. 急斜面安定性
急斜面で作業を行うためには、斜面での安定性を確保しなければなりません。車幅を広くすれば安定性は向上しますが、一方で車体を大きくすると中山間地特有の狭い斜面や通路を走行できなくなり、また重量が増加することにより操作性に影響が出てしまいます。そのためコンパクトな機械で安定性を確保するには低重心化が重要な要素となります。また斜面での草刈り作業は前進・後進作業を交互に行う等高線作業を主体とするため、前進、後進の操作性は同じでなければ、オペレータは大きなストレスを感じます。
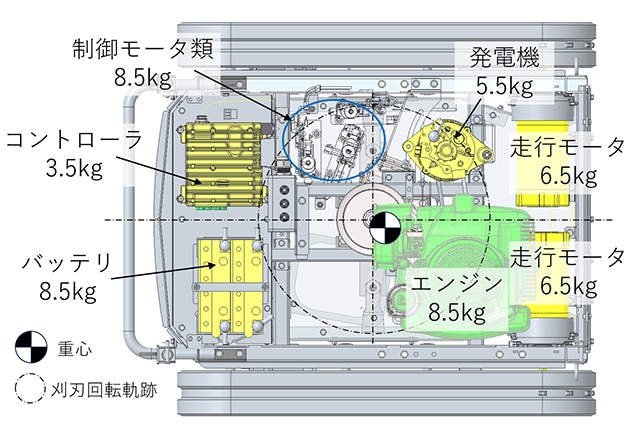
そこで斜面への安定性確保のための左右バランス、旋回時の操作感を向上させるための前後バランス、これらの両立をはかるために機器類の配置の最適化を行いました。重量が大きいエンジンは2サイクルバーチカルタイプを採用、また動力伝達構造をシンプルな構造とすることで、前後バランスは48:52、左右バランスは51:49、そして重心はほぼ機体中心になるよう設計しました。またバッテリなど熱影響により寿命が短くなる機器は熱源のエンジンから離れるようにレイアウトし(図3)、耐久性の向上を図っています。
左右、前後バランスの両立と低重心化を実現した機器の配置を図4に示します。実際の圃場では傾斜角45°での安定した作業を実現するために、作業時目標転倒角を50°とし、車幅を広くすることなく全幅870mmとコンパクトなサイズを実現し、お客様のご要望を満足しております。またメンテナンス頻度の低い機器を重層配置し、他の主要な機器を平面配置することで、ボンネット一体型ガードパイプを開けばメンテナンスの必要な機器に容易にアクセスすることができ、コンパクトながらも高いメンテナンス性を確保しています。
3.2. 大型機並みの草丈刈取り性
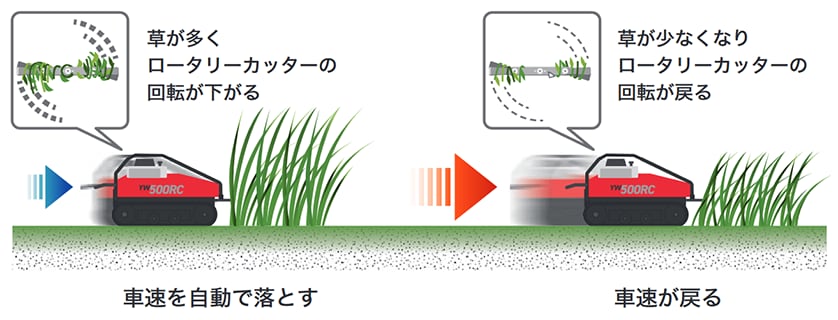
草刈り作業の効率性・快適性を損なう事象として、燃料切れや過負荷によるエンストのような作業の中断が挙げられます。特に斜面でのエンストは、過負荷の原因を取り除き、エンジンを再始動させるためにオペレータは斜面を降りていかなければなりません。これは作業中断させるだけでなく、危険を伴う行動となります。またエンストには至らなくても、エンジン高負荷時に起こる刈刃の回転速度の減少は、雑草の刈り残しや刈幅の減少など作業の快適性を低下させます。ヤンマーでは部分的に1mを超えるような高い草丈の草刈りを効率よく、快適に作業するために「快速制御」(図5)を採用しました。限られた動力を効率的に使用するため一時的な車両走行速度低下を許容し、危険を伴うエンストを回避しました。刈刃部は遠心クラッチを介してエンジンにダイレクトに接続しており、その回転速度の低下量を測定することにより擬似的に駆動トルクの増大を検出します。この低下量が一定値を超えると、過負荷が発生したとコントローラが判断し、走行速度を自動的に抑制し、エンジンの負担を軽減することにより刈刃回転速度を回復させます。この制御により、過負荷時のエンストや刈り残しを抑制します。さらに速度抑制を行なっていても負荷の軽減が間に合わない場合、エンジンをアイドリング状態にし、遠心クラッチを切ることでエンストを回避します。
3.3. バッテリ走行時間
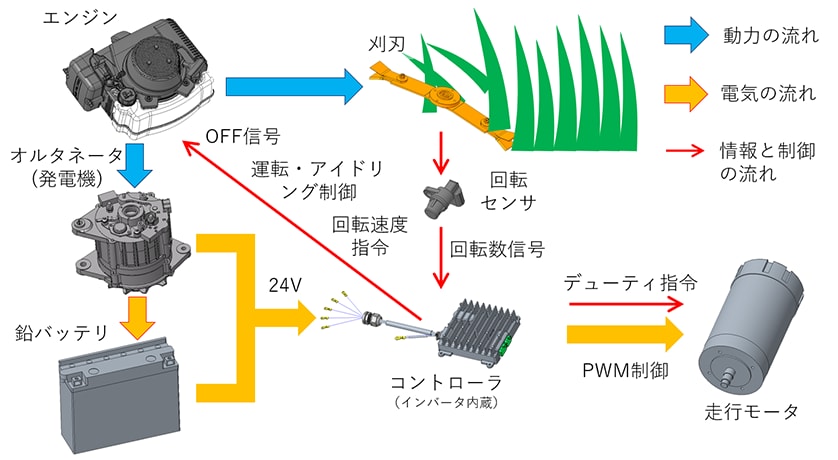
本機はシリーズハイブリッド方式採用(図6)により、草刈り部はエンジンによる直接駆動、走行部は電動モータによる駆動とし、エンジンで駆動する発電機により充電された鉛バッテリから電力を供給する方式としています。この方式により、バッテリに蓄えられた電力を利用し、エンジンを停止した状態でも車両を走行させることができます。
また鉛バッテリ特有の放電特性・劣化のシミュレーションを行ない、最適なバッテリ容量を設定しました。その結果、平地で10分間のバッテリ走行が可能です。これは他社同クラスの約10倍にあたります。この移動時間を利用し、エンジン非駆動で納屋や倉庫への搬入や、斜面での燃料切れの際に斜面上部までの移動などに活用できます。
4. おわりに
ヤンマーでは常にお客様の課題を解決し、より良いものを提供することを念頭に商品化を進めております。本商品開発では斜面での車両安定性の確保や、遠隔操作の実現など、たくさんの新しいチャレンジが存在しましたが、生産、販売、サービス、開発が一体となり課題をクリアしてきました。今後もお客様の意見や要望を反映し、自動化などの新しい技術を取り入れ、さらなる軽労化、安全化したより良い商品を提供し、安全で効率的な農作業に貢献していきます。
著者
