ヤンマーホールディングス株式会社 技術本部
電動電制システム開発部 第二技術部
ヤンマーテクニカルレビュー
自動走行散布作業機YV01の開発
~危険な圃場作業から作業員を開放するための取組み~
Abstract
Wine grapes are grown on 7.2 million hectares of land worldwide. Vertical Shoot Position, or VSP, is a common and widely used trellis system in these vineyards. And they are sometimes located on steep hills.
Yanmar has developed an autonomous driving agricultural sprayer to solve the problems of workers falling on steep slopes and being exposed to pesticides on vineyards in France.
1. はじめに
醸造用ブドウは世界で720万haの農場で栽培され、2億4千ヘクトリットルのワインが生産されています(※1)。ワイン用ブドウは日当たりと水はけがよい土地での栽培が好まれ、丘陵地で栽培されることが多い作物です。また、醸造用ブドウはブドウの木を列状に植えて枝を鉛直方向の面に誘引する垣根栽培が主流となっています。
主要なワイン生産国の一つであるフランスのシャンパーニュやブルゴーニュ地方ではブドウ列の間が1m前後と狭く、小型のクローラキャリアや木を跨いで走行するストラドルトラクタを用いて薬剤散布などの作業が行われています。クローラキャリアは作業者の農薬被ばくの問題もあり作業者は炎天下の下、防護服と防護マスクでの作業をしています(図1)。またストラドルトラクタは作業能率が高い一方で操作に熟練が必要で傾斜地でのスリップや転倒事故がしばしば発生しています(図2)。作業者の高齢化や人手不足から熟練者の確保が難しくなってきています。
以上の課題を解決するために、設定操作が簡便で傾斜地での安全な自動作業が行える自動散布ロボットYV01(図3)を開発しました。
- ※1International Organization of Vine and Wine 2023年



2. 急斜面、悪路での作業安定性の実現
2.1. 車両構造
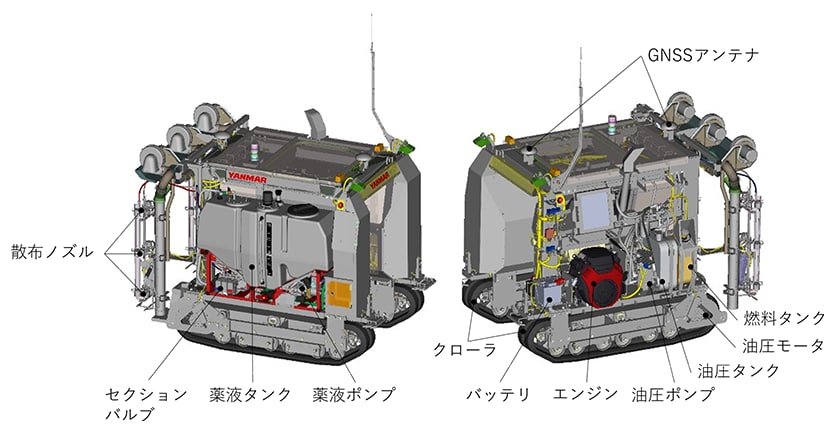
図4にYV01の主要部品を示します。
シャンパーニュ地方のブドウ農場の平均斜度は12%(約7°)、場所によっては60%(約31°)の急傾斜となっています。また、土質は石灰質チョーク主体とした粘土と砂土が混じり、場所によってはこぶし大の礫がある土壌です。このような悪路で安定した走行性能を実現するためにクローラ方式の走行部を採用しました。
車両はクローラ内に配置した油圧モータを車体フレーム上の可変容量油圧ポンプで駆動することで走行します。自由度の高い油圧配管により軽量な門型の車体構造を実現しました。これにより1.4mまでのブドウの木を跨いで走行することができます。また、無段階で左右のクローラを逆転まで動かすことができ狭い圃場内でのスムーズで正確な走行を実現しています。
車体フレーム左側にはエンジン、油圧ポンプ、油圧タンク等の重量物を低い位置に配置し、車体フレーム右側には薬液タンク、薬液ポンプ等の散布装置を配置しています。これにより前後方向45%(約24°)、左右方向20%(約11°)までの傾斜での走行性能を確保しています。
2.2. 自動走行制御
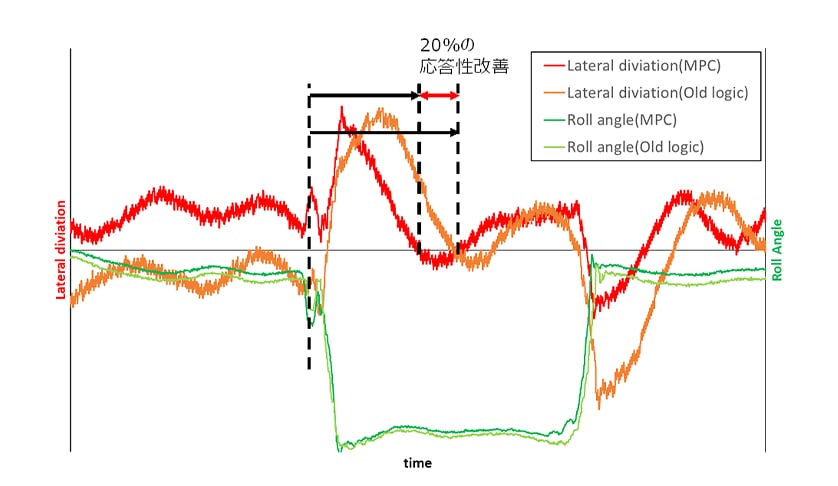
YV01が走行する圃場は急傾斜で土壌の性質上とても滑りやすく、走行経路からのわずかな逸脱で機械が木に接触してしまいます。このような圃場でも安定した走行を実現するためにモデル予測制御を適用しました。モデル予測制御は、制御対象のモデルに基づいて制御周期毎に機械の挙動を予測し制御することでロバストな制御を行うことができます。これにより応答性能が開発当初から20%改善したことで路面の凹凸やスリップにより走行経路からずれた場合でも、すぐに位置を修正し木に接触しない走行性能を実現しました(図5)。
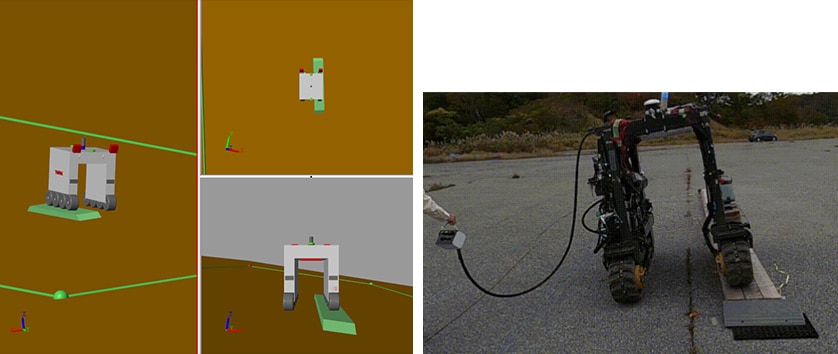
スピーディに制御ソフトウェアを開発するため私たちはModel In the Loop Simulation(以下「MILS」という。)とRapid Control Prototyping(以下RCPという。)を活用しました。
MILSは制御モデルとプラントモデルの特性に合わせてシミュレーション上で制御設計を行う手法です。これにより実機試験を行う前に機能・性能また危険な動作もシミュレーション上で確認することができました。
実機試験はMILSで作成した制御モデルをそのままRCPコントローラに書き込むことにより迅速にプロトタイプを作成しました。さらに現場で試験データとMILSの結果を比較し、機能・性能の改善を効率的に進めることができました(図6)。
3. 簡単で分かりやすいユーザインターフェースの実現
3.1. ユーザインターフェースのコンセプト
農機の自動化にあたり、作業時には各種作業の設定値や自動走行するための圃場や作業する経路の作成等の入力操作が増えこれらの習得も必要になります。作業者は、若手からベテランまで機械操作には慣れていますが、特にベテランは新たにこれらの入力操作を覚えていくことに時間がかかることが多く、十分に活用しにくい課題がありました。そのためこれらの操作をなくし誰でも簡単に作業できるようにしてほしいという顧客からの要望から、YV01では専用端末を設けず一般的である程度慣れているスマートフォンだけの操作で作業をできるようにしています。
3.2. 作業時の操作
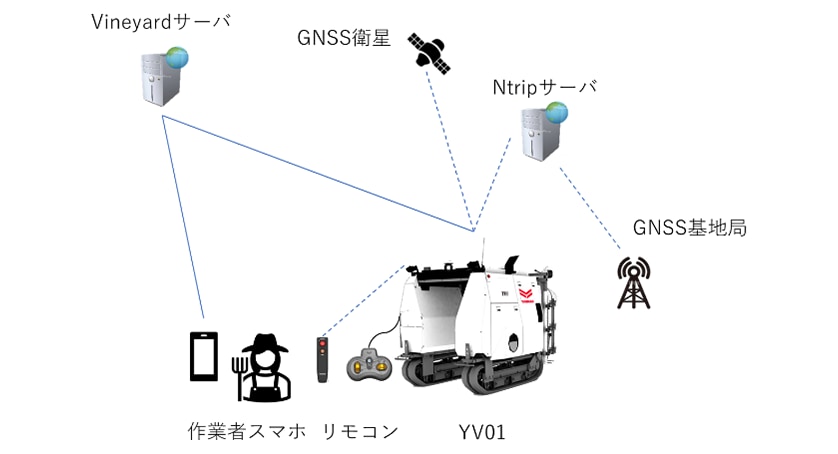
YV01は簡単な操作だけで作業ができるように自動走行システム(図7)を利用して自動で作業を行います。
予め顧客からの依頼を元に、管理する圃場と作業で走行する経路をWEBシステム(Vineyardサーバ)に登録しておきます。
作業者は、スマートフォン(作業者スマホ)を用いて、作業したい圃場や作業内容、作業したい機体を登録します(図8、図9)。その内容は自動で機体(YV01)に連携され、リモコンを用いてYV01を移動し作業を開始します。
その後は、YV01に搭載されるGNSS(※2)受信機とNtrip(※3)サーバからの補正信号で正確に機械の位置を計算し決められた経路を元に自動で作業を行います。
- ※2Global Navigation Satellite system(全地球測位衛星システム)
- ※3The Networked Transport of RTCM via Internet Protocol インターネットを通じてGNSS補正データを受信することで人工衛星の位置誤差や電波の遅延誤差を解消して精度を高めた測位システム


4. おわりに
ヤンマーは2023年にフランス市場において醸造用ブドウ圃場向けの自動走行散布機を販売開始しました。2024年には、除草アタッチメントを装着することで自動除草作業も可能になりました。今後もフランス醸造用ブドウ市場に対して他の作業もできるように現地のニーズに応じた商品・サービスの提供を進めていきます。さらに今回開発した自動走行技術、自動走行システムを他の地域や作物に展開し地域産業の持続化へ貢献していきます。

- 「YV01」について(英語)
https://www.yanmar.com/fr/viticulture/en/ - Yanmar Vineyard Solutions branding video
- HANASAKAムービー ヤンマーヴィンヤードソリューションズ編
著者


ヤンマーホールディングス株式会社 技術本部
イノベーションセンター プロトタイプ開発部
赤瀬 正樹

ヤンマーホールディングス株式会社 技術本部
イノベーションセンター プロトタイプ開発部